高铁架桥机是进行高铁铁路桥梁自动化和连续性铺设的大型机械设备。主要研究了主支腿三向定位系统、辅助支腿的起落控制机构、支腿电液平衡系统、驱动系统及整体掉头技术、创新设计(无人机监控系统)。增强了防护措施,包括对起升卷扬系统的监控与防护、对起升速度的保护、有效地利用PLC 技术等。随着我国高速铁路建设事业的进一步发展,尤其是多山地区铁路建设的蓬勃发展,国内对于流动式架桥机需求量会快速增长。因此,改进现有流动式架桥机的性能,开发岀操作简便,使用灵活,安全可靠的流动式架桥机具有非常现实的意义。
1.1 总体思路
我国高速铁路建设近些年来开始由平原地区向东南沿海、西部山区发展。这些地区多是山川、丘陵、湖泊。受地形条件的影响,这些地区桥梁的架设经常会遇到桥隧相连,隧道口架梁的工况。施工空间狭小,施工难度极大。传统施工作业方法体积庞大、操作复杂已经不适应这种架梁需要,大型高铁架桥机的研究迫在眉睫。团队查阅大量国内外资料,搜索国内丹东多山隧道等架桥成功的案例。对已有架桥机的原理和机械结构进行初步的研究。同时还对高铁桥梁的桥梁截面进行深入研究,发现在桥梁铺设中,为提高桥梁的安全性和稳定性,以及缩短工期,往往会采用箱梁。而现有架桥机仅适用于T型梁或工字型梁,如果是其它梁型就可能因其内净空的宽度不够而不能使用。该型高铁架桥机专门针对箱型梁的铺设而设计,有效的改变了现有架桥机的单调作业模式。然后研究设备的机械原理并设计机械结构。利用静力学,动力学,运用Matlab进行仿真,对设备的整体工作原理进行稳态分析。根据分析数据,确定设备尺寸,运用三维实体造型软件Solidworks建立设备的三维实体模型。将Solidworks导出的模型导入ADAMS软件中,定义刚体,添加约束、力、运动等,完成架桥机的机械系统模型建立。最后结合仿真和分析结果,进行近一步的设计和优化,例如在仿真过程中发现因搭建桥梁较大,桥梁离地较高,车辆体积庞大,在运输和架桥时存在大量死角。靠施工人员观察,危险性极大。沟通不便,效率低。肉眼无法对桥梁搭建质量进行判断,因此我们又增加了无人机监控系统,对桥梁搭建进行实时监控。
1.2技术性能指标
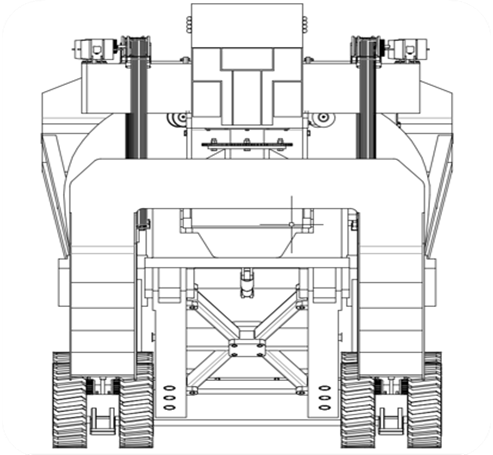
1.2.1主支腿三向定位系统
主支腿位于架桥机前端,主要是由一个支柱脚、四个支条、一块底板、左右前端两个小脚、以及两个弯曲臂组成的稳定三角形结构。用于在架梁时对车身定位,保证在车辆重在行进时不发生过大前倾及左右晃动。
1.2.2辅助支腿的起落控制机构
辅助支腿主要负责主支腿落脚前的承载和轻载下替换主支腿的功能。动力来源为支腿底部左右两个液压管。
1.2.3支腿电液平衡系统
(1)支腿液压同步系统工作原理
主支腿液压动力系统内部泵站为4 个球铰油缸、4 个长行程提升油缸和两个顶升油缸提供动力油源。主支腿泵站主要控制主支腿油缸的伸缩。辅助支腿泵站为后支腿两个翻转油缸和两个顶升油缸提供动力油源。后支腿泵站主要控制辅助支腿的翻转油缸和顶升油缸的伸缩动作。
(2)电液比例技术
阀内电气-机械转换装置根据输入的电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例的压力、流量输出。阀芯位移可以以机械、液压或电的形式进行反馈。由于电液比例阀一般都具有压力补偿性能,所以它的输出压力和流量可以不受负载变化的影响。电液比例阀的主阀体部分仍是普通的流量控制阀。
(3)电液比例技术在架桥机主梁前后支腿液压同步系统上的应用
在架桥机在转运、过隧时,要求前后支腿油缸在伸缩过程中保持同步。由于主,辅支腿是两个相互独立 的泵站,在这里我们采用电液比例技术实行远距离的同步控制。架桥机在安装调试时,要求主机通过两支腿上的油缸调整整机高度。
1.2.4驱动系统及整体掉头技术
(1)驱动与制动
驱动由前后十几组主动轮组成。主动轮由驱动电机驱动,经变速齿轮箱传至车轴。同时主动轮内配有液压悬挂,可在运输及架桥时调节高度。制动由多组制动轮实现。制动轮采用鼓刹,加以气动辅助,价格便宜,可靠性高,制动力强大。
(2)回转机构系统的设计
回转机构系统是整个调头装置的核心部位,它由上层的桥机支撑平台结构、中间的三排滚柱式回转轴承及下层的回转支撑底座组成。回转动力由 2台功率为 7.5 kW 的 YZPEE160L-8 型变频调速制动电机提供,电机通过连接法兰盘竖直安装在支撑平台结构上的固定位置。
1.2.5创新设计(无人机监控系统)
桥梁离地较高,车辆体积庞大,在运输和架桥时存在大量死角。靠施工人员观察,危险性极大。沟通不便,效率低。因此增加无人机监控系统,实时监控施工过程。无人机铝合金机身、碳纤维机臂,质量轻盈。最大水平速度13m/s。两轴装有FPV摄影镜头,云台相机快拆接口,具有聚焦功能,可稳定跟拍。视频图像传至控制室屏幕,遥控范围2000m,2.4GHz。操作人员可以直观地看到实际情况,并做出相应地操作,在运梁、架梁过程中可极大地缩短时间,提高效率。同时,有无人机进行监控,便可减少进行观察的工作人员。保障人员安全。
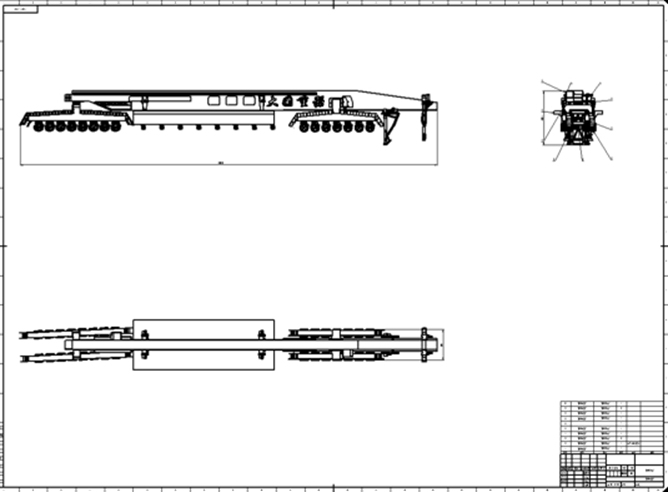
额定起重量 900吨
适应梁型 32m 24m 20m
爬坡能力 30‰
架梁适应最大纵度 20‰
走行最小转弯半径 150m
1.3 作品的实用性
1.我国高速铁路建设近些年来开始由平原地区向东南沿海、西部山区发展。这些地区多是山川、丘陵、湖泊。受地形条件的影响,这些地区桥梁的架设经常会遇到桥隧相连,隧道口架梁的工况。施工空间狭小,施工难度极大。
2.提高桥梁的安全性和稳定性,以及缩短工期,往往会采用箱梁。该型高铁架桥机专门针对箱型梁的铺设而设计,有效的改变了现有架桥机的单调作业模式。
3.研究设备的机械原理并设计机械结构。利用静力学,动力学,运用Matlab进行仿真,对设备的整体工作原理进行稳态分析。根据分析数据,确定设备尺寸,运用三维实体造型软件Solidworks建立设备的三维实体模型。将Solidworks导出的模型导入ADAMS软件中,定义刚体,添加约束、力、运动等,完成架桥机的机械系统模型建立。最后结合仿真和分析结果,进行近一步的设计和优化。
4.靠施工人员观察,危险性极大。沟通不便,效率低。肉眼无法对桥梁搭建质量进行判断,因此我们又增加了无人机监控系统,对桥梁搭建进行实时监控。
5. 对于一些需要架桥铺设的特殊路段,这类铺设方式的难度相当高,效率低下,并且其安全性有待提高。高速铁路桥梁由于需要满足行车安全,乘坐舒适,以及达到设计最高时速的要求,承受动力影响较大,因此必须要有足够的强度、稳定性、刚性和耐久性。
6. 桥梁施工方式的多样化,要求架桥机的种类要全,且有良好的适应性。由于桥梁形式多样,架桥设备施工速度不同,开天窗作业频繁,可能出现铺轨和架梁同时进行与先架梁后铺轨施工模式并存的现象。