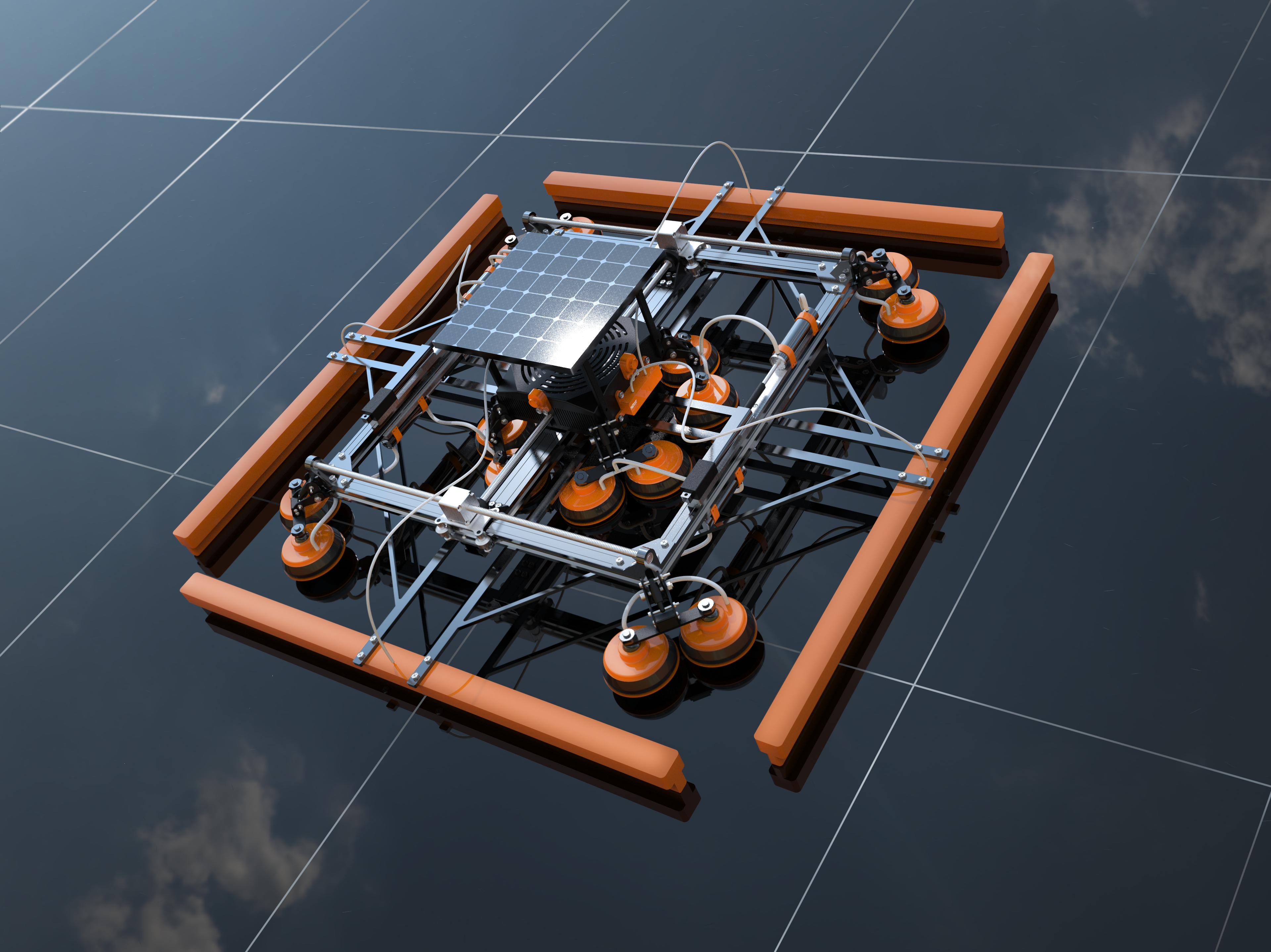
随着城市建设的发展,高楼建筑越来越多。现如今高楼建筑外墙大多设计为玻璃外墙,玻璃外墙经过长时间的风吹日晒,需要清洗,而高楼外墙清洗是一个非常大的工程。目前清洗楼层外墙,只能依靠人工清洗,但是目前人工出现成本高,不能长时间工作且危险系数高等问题。虽然目前市面存在外墙清洗的机器人,但是会出现因高层风速大,无法长时间在墙面吸附的安全问题,同时也会出现无法适应墙面复杂情况的等问题,现在市面上并没有可以大规模使用的机器人。为解决高空外墙玻璃清洗这一困难工程,本团队现设计垂直墙面吸盘爬壁机器人。 工 人工在清洗玻璃外墙
工 人工在清洗玻璃外墙
产品结构介绍
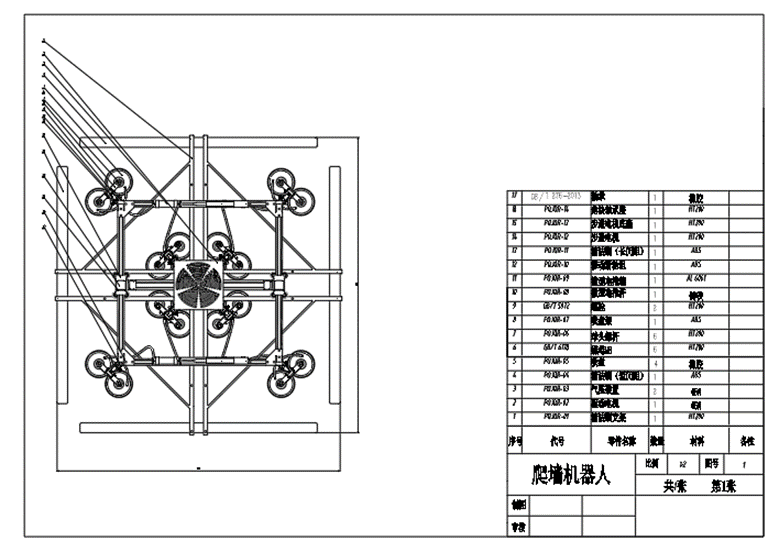
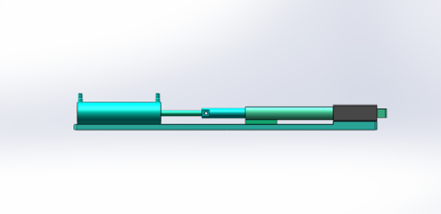
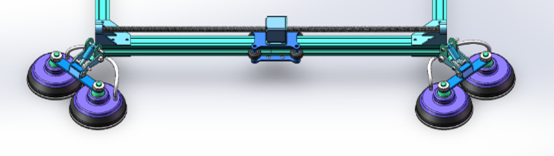
机器人整体工程图
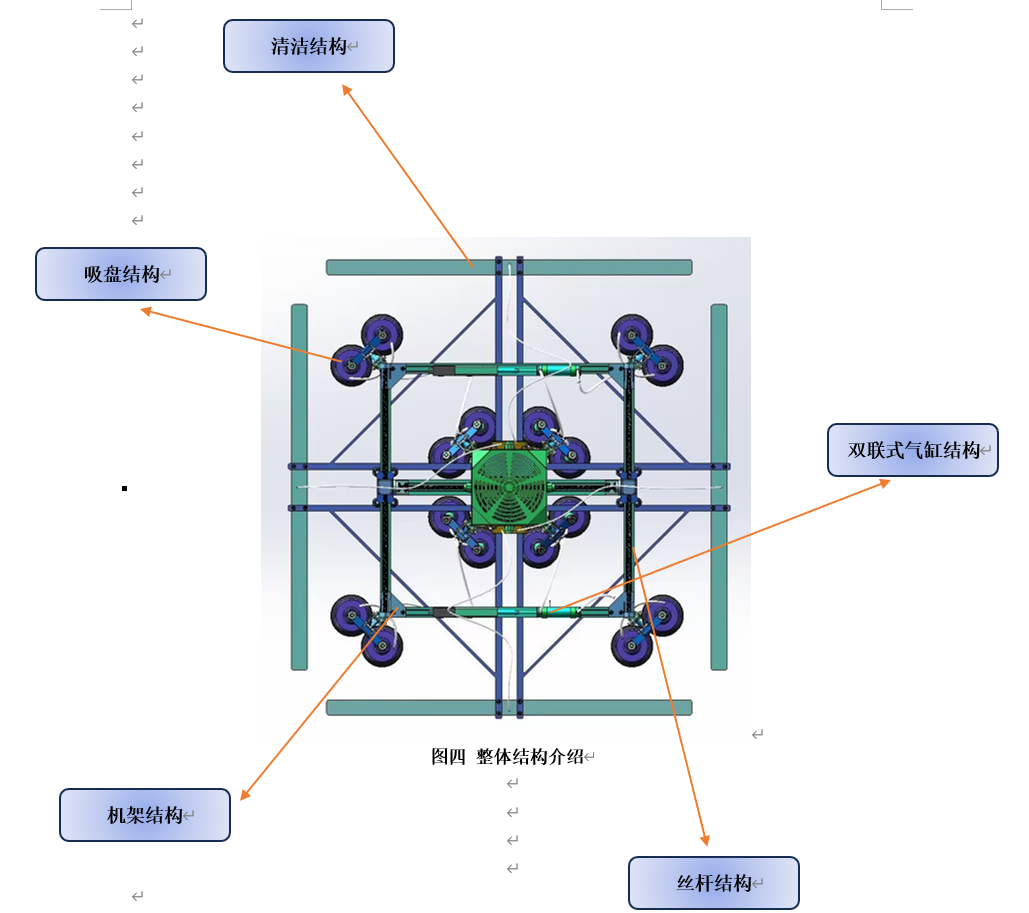
本产品共有有400多个零件构成,产品由五大结构构成,五大结构分别是:清洁结构、吸盘结构、双联式气缸结构、机架结构、丝杆结构
。各个部分各司其职,相互合作,共同完成高楼玻璃外墙清洁这一巨大又艰难的工程。
产品功能介绍
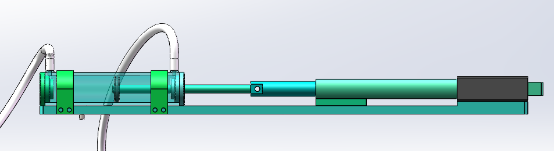
功能一:墙壁吸附功能
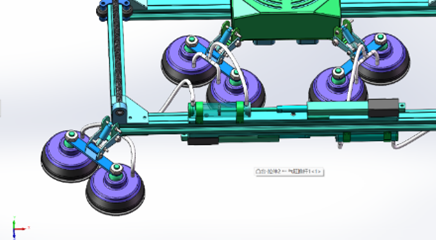
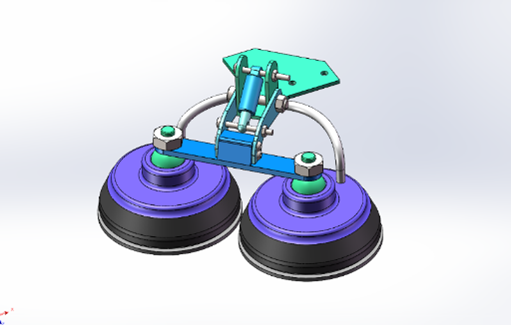 吸盘结构
吸盘结构
墙壁吸附功能依靠吸盘进行吸附,机器人携带16个吸盘进行吸附。吸盘底部直径为82mm,16个吸盘足够支持机器人吸附在垂直墙面上。吸盘的支撑采用球头螺栓的设计,由于球头可以在各个角度进行旋转,因此当遇到非垂直墙面时,机器人也可以适应在一定角度内的非垂直墙面上运动。吸盘的吸附和放开受气缸的控制。在气体控制方面,本团队创新的提出了联控法进行控制,用一个推杆电机和气缸控制气体,将内部和外部的吸盘联通管分别安装在气缸的两端,这样当外部吸盘需要吸附时,气杆只需回缩,即可将外部吸盘的空气吸走使外部吸盘吸附。同样内部吸盘需要吸附时,气杆只需向外推出,气体移向另一边,内部吸盘由于气压变小,进行吸附。
双联式气缸
双联式气缸效果图
功能二:位置移动功能
电机推动前后效果对比图
位置移动功能依靠丝杆电机系统,微型电机推杆、吸盘等零件进行移动。当机器人需要进行移动时,内部吸盘需要先“放气”,此时电动推杆会向内移动,气体被移入内部吸盘,内部吸盘失去吸力,吸盘在电机的运作下,升起。升起后,丝杆进行旋转,带动内部吸盘向指定方向移动,吸盘到达指定位置后,推杆收缩,吸盘于墙面贴合接触,随后推杆电机进行向外推进,气体被运向外部吸盘,内部吸盘重新吸附在墙面上,此时如果机器人人还为到达指定地点,机器人外部吸盘机构将会重复内部吸盘机构的动作,在丝杆电机的驱动下,进行移动。如果需要长时间移动,那么内部外部吸盘机构将会交替移动,一步一步运动并走完全程。
机器人的位置移动模式分为两种,一种为基于视觉识别的自动模式,另一种为基于物联网的人工控制模式。机器人在自动控制模式时,机器人靠携带的四个摄像头观察周围环境,并通过Opencv系统进行分析和控制,机器人将按照工程师设定的路线进行移动,移动过程中,机器人携带的摄像头会进行环境分析,观察周围的危险,确定适应的行进路线。在人工模式中,机器人由人工控制,操作人利用移动终端程序控制机器人移动、避障和清洗。
移动终端界面效果图
玻璃清洁功能
玻璃清洗功能依靠机器人丝杆和清洁刷进行清洗。当机器人到达预定区域之后,吸盘吸附并固定好机器人后,机器人通过携带的摄像头进行视觉识别判断,进行识别检测之前的环境信息,识别完成之后玻璃清洗便开始,此时清洗刷会在丝杆电机的控制下,进行前后往复运动来清洁墙面。清洁刷在清洁时,细管会源源不断的向清洁刷供应新的清洁剂,并且清洗时摄像头实时检测周围环境,待墙面清洗干净之后,机器人进入行进模式,向前推进进入下一阶段清洁区域。相较于传统的玻璃清洗机器人,本团队设计的机器人可以上下左右移动,而传统的玻璃清洗机器人只能向一个方向或者其反方向移动,其拐弯非常麻烦。
产品创新介绍
创新点一:双联式气缸结构
双联式气缸示意图
本团队通过研究相关产品,进行市场调研和对比分析,设计了双联式气缸这一机械结构。双联式气缸可以用一个气缸控制两个部分的吸盘。双联式气缸利用推杆往复运动使气缸内气体发生移动,气体移动使内外两部分的吸盘压强出现变化,内部和外部吸盘分别同时进行吸附和脱离。利用此结构可以让内部和外部吸盘同时发生变化,并且此结构无需计算机控制系统,可以安全高效的控制内部和外部吸盘。利用双联式气缸结构在爬壁机器人上面将有以下优点:
优点一 增强墙面适应性:
双联式气缸可以通过控制吸盘的吸附和释放,实现机器人在不同类型的墙面上的移动。这种装置可以适应在不同表面的,包括平滑表面、粗糙表面甚至是倾斜表面,提供了更广泛的实际应用场景。
优点二 使零件数量减少:
双联式气缸在爬墙机器人上的应用可以针对性的减少相应吸盘气体控制零件的数量,做到零件使用效率的再优化。还减少整体重量,而且还能提高机器人在工作时间和移动速度方面的效率。
优点三:动态调整和控制:
由于双联式气缸提供了独立控制吸盘状态的能力,机器人可以根据当前情况动态调整吸附力的大小。这使得机器人能够在不同表面的墙壁上自适应地调整吸附力,以确保稳定性和操作的安全性。
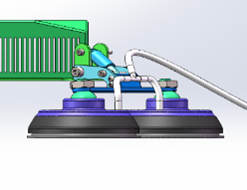
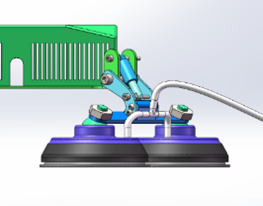
创新点二:球头式洗盘结构
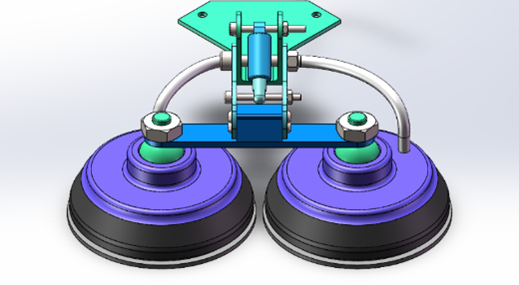
球头式吸盘结构示意图
由于在实际生产生活中,墙面环境复杂,部分区域甚至有不平或者呈现一定角度,市面上大规模墙壁清洁机器人无法大规模应用。为了解决之一难点,本团队创新的设计了球头式吸盘结构。球头式吸盘结构拥有以下优点:
优点一 可以多自由度运动:
由于爬壁机器人通常需要在垂直表面上实现多自由度的运动,例如上下移动、左右移动、前后移动等。球头式机械结构可以通过球头和球座的组合,提供多轴的旋转和倾斜运动,使机器人能够在墙面上灵活移动和定位。
优点二 可以自适应连接:
由于爬壁机器人需要在不同形状和类型的墙面上操作,球头式机械结构可以适应不同表面的连接。通过调整球头和球座之间的结构或采用可变刚度材料,机器人可以确保稳固的连接,并适应不同类型的墙面材质和表面几何。
优点三 可以轻量化设计:
由于爬壁机器人需要轻巧且具备良好的负载能力,球头式机械结构可以实现机器人重量优化。通过使用轻质材料,优化结构设计和减少传动元件的数量,可以降低机器人的重量,并提高其移动效率和能耗。
创新点三:丝杆式电机行进系统
 丝杆式电机行进系统示意图1
丝杆式电机行进系统示意图1
丝杆式电机行进系统示意图2
由于传统机器人移动采用舵机或者电机控制,移动距离控制并不精确,针对这一难点,本团队提出设计采用丝杆式电机作为行进系统。丝杆行进系统在爬墙机器人中的应用可以将机器人的运动控制和位置调整集成在一起。机器人通过调节丝杆电机的旋转,将力传递给丝杆,从而实现沿着墙面上下移动。螺母贴合在丝杆上,随着电机的转动而移动,控制机器人的上升和下降。运用丝杆电机行进系统,将有以下优点:
优点一 增强精确定位能力:
丝杆行进系统通常具有较高的控制精度和可重复性,可以实现机器人在垂直表面上的准确定位。这种精确定位的优势可用于精细的清洁、检查或维修任务,使机器人能够对需要处理的区域进行精确操作,提高效率和减少误差。并且由于丝杆结构的应用,机器人四周都可以安装上清洁刷。机器人可以四个方位任意移动,而传统的机器人只能朝一个方向运动或者其反方向移动。
优点二 增强稳定性和安全性:
丝杆行进系统可以提供稳定的行进轨迹,减少机器人在垂直表面上的晃动和不稳定情况。这提高了机器人的稳定性和运动控制,减少了意外滑落或失去控制的风险,进一步增强了安全性。
优点三 节省多余空间:
丝杆行进系统可以采用紧凑的设计,从而节省了爬墙机器人的空间。相比于其他行进方式,例如轮子或履带,丝杆行进系统在紧凑空间中更容易集成和安装,使得整个机器人更加灵活和便携。
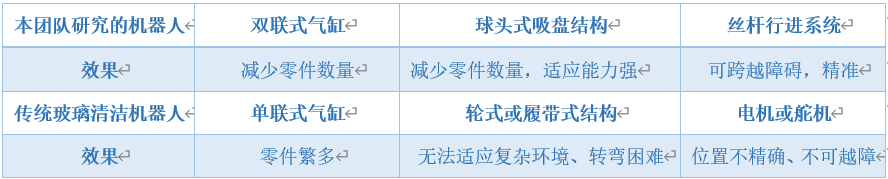
3.4 市场产品横向对比
对比其他已经研发的产品,本团队设计的爬壁机器人优势明显。传统玻璃清洁机器采取一个吸盘吸附在墙面上,形成负压区,依靠自身携带的小轮在墙面上进行移动。这种机器人有一个很大的弊端,即一旦墙面出现缝隙或者墙面呈现一定角度或墙面不平有障碍物,传统的玻璃清洁机器人将无法吸附在墙面上,最后掉落,在实际生产生活中存在着极大的安全风险,这也是为什么如今已设计的玻璃清洁机器人没有被大规模运用的原因。

本团队设计的爬壁玻璃清洗机器人,拥有很好的解决上述问题。利用球头式吸盘结构,可以使机器人完美的贴合在墙面上面,即使墙面呈现一定角度,机器人也可以完美贴合墙面,保证使用的安全性。当在清洁工作中遇到障碍物,吸盘的推杆可以收缩,将吸盘抬起来,然后在丝杆的运作下,机器人向前进行移动跨过障碍,这一优势也是传统玻璃清洁机器人所不能拥有的。
产品技术验证和再优化介绍
产品技术验证
技术验证一:机架
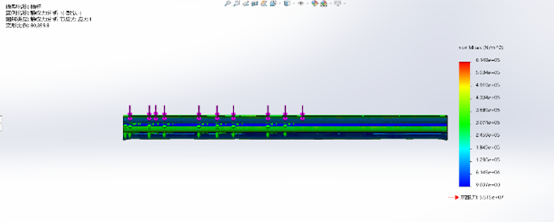
机架有限元分析应力图
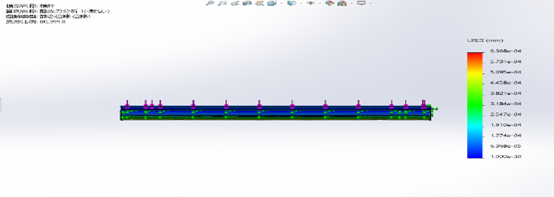
机架有限元分析位移图
本团队对产品机架进行有限元分析,给予机架下方固定点,上方给予98N的力,材料设置为铝合金6061合金。经过solidwrks simulation 有限元分析得出应力分析结果和位移分析结果。经过对于结构的分析,本团队认为机架的结构和材料符合实际生产运作要求。
技术验证二:丝杆系统
本团队要对丝杆进行有限元分析,验证所设计选型的丝杆是否可以应用于实际生产生活,对丝杆进行受力计算是一个重要环节。丝杆的临界承载力公式如下:
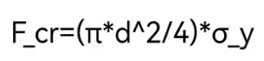
在公式中,F_cr是临界承载力,d为丝杆的直径,δ_y为杆件的屈服极限。另外丝杆受力主要为剪应力,因此计算还需要计算剪应力的大小。丝杆的剪应力由两部分组成,一部分由螺纹面部分剪应力和杆件本体的剪应力。螺纹面的分部分剪应力可公式计算如下:

其中τ_1为螺纹面分的剪切应力,F为丝杆作用的荷载,L为丝杆的长度,α为螺纹的半顶角。杆件的本体剪切应力计算公式如下:

其中τ_2为杆件本体的剪切应力,F为丝杆作用的荷载,α为螺纹的半顶角。根据本团队设计和选型,丝杆的直径为8mm,材质选择为45号钢屈服极限为300Pa。丝杆长度为500mm,螺纹的半顶角是45°,丝杆工作荷载经计算为95N/m2。经过计算得出F_cr临界承载力F_cr=6.370N,丝杆本体的剪切应力为:52.5MPa,丝杆螺纹剪切应力为74.3MPa。经过solidworks软件的的有限元图可知,此丝杆的设计及选型满足实际生产生活所需。
 丝杆应力有限元分析图
丝杆应力有限元分析图
技术验证三:吸附系统
机器人依靠吸盘吸附在墙面上,吸盘的吸力需要达到相应力度才能让机器人在墙体上安全工作。本团队设计的吸盘面积为52.7834cm2。根据吸盘吸力公式如计算出吸盘的吸力。
吸盘的吸力公式如下:
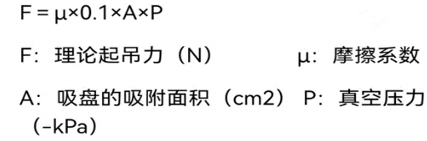
其中:S为吸盘面积(cm2),P为气压(kg/cm2),μ为安全系数>=2.5。在计算好吸盘的吸力之后,需要再算出吸盘与墙面的的摩擦力,当 摩擦力大于自身重量时,机器人即可安全吸附在墙面之上。计算摩擦力的公式如下。
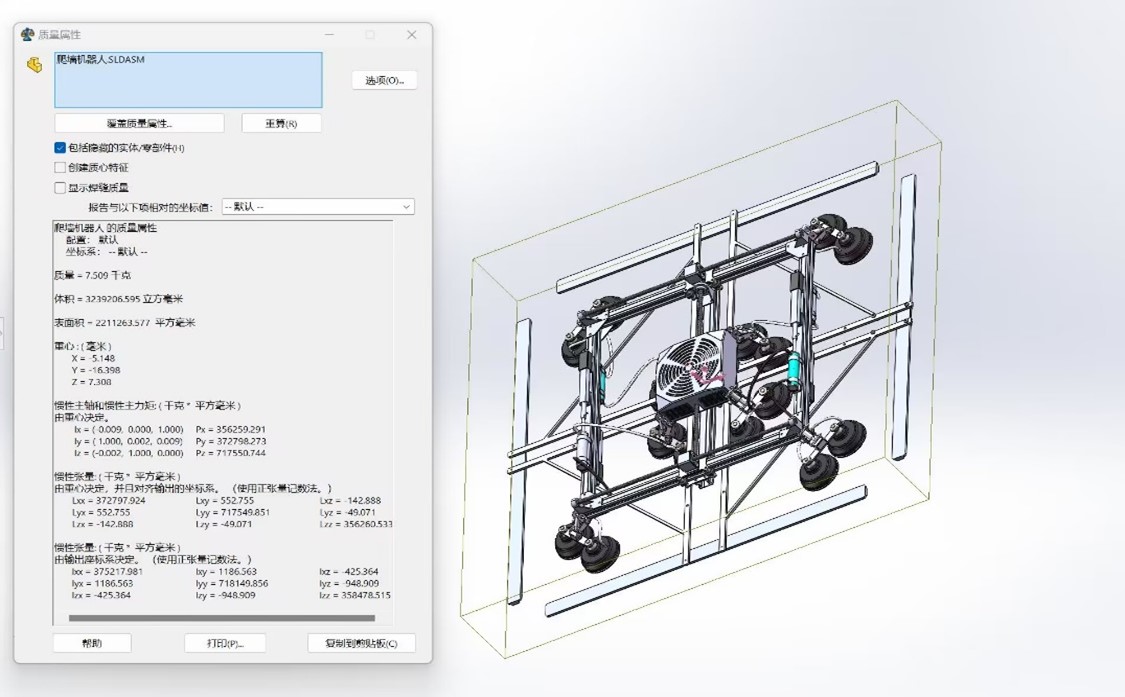
经计算得出吸盘吸力F=6.334N,理论起吊力为17.328N,机器人在吸附时,共有8个吸盘吸附,机器人对墙面上的理论吸力为136.685N。给予材料后solidworks算出机器人自身约重7.5kg,重量为73.5N,吸力达到实际使用要求。
 产品结构再优化
产品结构再优化
为了在保证安全的情况下进一步降低机器人整体的质量,本团队对机器人整体结构进行拓扑优化。本团队利用solidworks软件的Simulation插件进行拓扑优化,根据拓扑优化进行产品结构的再优化。选定机架为优化对象,机架底部固定,上方给予98N的力然后进行拓扑优化。优化结构如下图所示:

机架拓扑优化效果图


























 产品结构再优化
产品结构再优化



