本项目是基于单源路径优化的一款自主巡航的轮式电力巡检机器人,以STC11F32XE单片机微型硬件作为核心模块,对传感器传输模块和机器人驱动模块进行自动控制,以云端控制系统作为基础,以视觉监测系统作为辅助系统,采用人机交互的方式,运用人工智能算法实现电力巡检机器人和人的互动和协作。项目的总体设计框图如下所示:
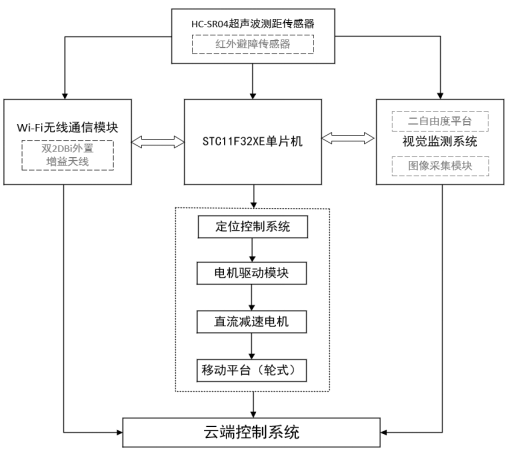
图 1 电力巡检机器人的总体结构设计框图
(1)基于单片机的视觉监测系统
该小车采用了先进的视觉监测技术,能够对识别到的图像进行高效处理,并提取目标物的三维坐标信息。此外,该系统还配备了二自由度平台,可以实现摄像头在上下左右方向的自由转动,以确保图像的实时传输,并保证用户能够对当前环境进行实时的监测和掌握。
(2)智能诊断
电力巡检机器人内置GSP定位技术以及高精度地图算法,可以自动规划路径并迅速到达目标位置。同时,该机器人配备了先进的智能诊断系统,可对目标进行全方位的智能分析和判断,并通过高清摄像头将实时画面数据传输给单片机处理中心,实现快速、准确地判断目标问题及相应的维修流程。
(3)信号传输模块
设备采用了先进的WiFi传输技术,并配备了双2DBi外置增益天线,使其具有超强的信号覆盖范围和穿透能力。通过这种技术,该设备的信号范围可达50m,并且具有极高的信号强度,从而使网络连接更加稳定和快速。同时,它还支持实时图像传输和双向指令透传,可以满足多种应用场景的需求。
(4)电源模块
电力巡检机器人采用高性能锂电池作为能量供应,具备高能量密度、长寿命、轻量化等多重优点。该小车的智能电量管理系统具有先进的电能监测功能,可以实时监测电池电量,并进行精密计算和预测。若电量低于预设值,系统便会自动关闭巡检任务,并迅速返回充电桩接受充电。一旦电量充满,该系统会自动向云端控制系统发出信号,并自主开始执行之前中断的巡检任务。这种创新性的技术设计,极大地提高了巡检效率和质量,为电力巡检行业的现代化进程带来了更加广阔的前景和可能性。
(5)运维识别算法优化
运维顺序规划是一项关键的工作,可以大幅提高电力设备的维修效率和水平。通过采集电力设备状态参数并利用大数据技术进行综合分析,计算出最优的维修方法,维护人员可以更加高效地对设备进行安全维护。
综上,基于深度学习、数据挖掘等技术构建智能化视觉识别系统,搭载传感器,实时对电力设备进行检测和诊断,及时推送预警信息,并为维操作提供参考;通过对维修过程中的相关数据进行收集和分析,实现对维修效率的提高和持续改进,通过大数据的分析,可以深入了解电力设备的工作状况、维修记录等信息,帮助维护人员更好地管理和维护电力设备;智能电量管理系统通过将数据上传至云端进行统计分析,进一步优化巡检方案和能耗控制策略,提高设备的使用寿命和性能;运维顺序规划技术结合了大数据、智能化视觉识别和传感器等先进技术,帮助维护人员更加高效地进行电力设备的安全维护和管理,整个系统的智能化程度和自主化操作提高电力巡检的效率和质量,为未来电力巡检行业的发展带来了更加广阔的前景和可能性。






