近年来,国际经济快速发展,人民的生活水平逐渐提高,在生活、经济水平逐年向好的背景下,国内各大城市的垃圾分类水平却日渐堪忧,因垃圾分类系统的不完善导致各大城市已经被“包围”在"垃圾山”之中。倘若垃圾分类不能有效开展,不久的将来,城市垃圾填埋场也即将饱和。为此党的“十九大”首次将垃圾分类问题写入报告,对“加快生态文明体制改革,建设美丽中国” 做出重要部署,明确要求”加强固体废弃物和垃圾处置”。上述这样一种现实情况造成了以下社会问题:
(1)垃圾乱投放;
(2)垃圾分类不明确;
(3)由于垃圾分类不明确,进行二次分类时造成人力物力的浪费;
(4)污染环境,造成环境的破坏;
(5)造成了土地资源的浪费。
对于以上的问题,凸显出制造智能垃圾桶的必要性。垃圾分类收集可以减少垃圾处理量和处理设备,降低处理成本,减少土地资源的消耗,具有社会、经济、生态三方面的效益。
1.2 项目实施的目的和意义
随着经济的增长,智能垃圾桶对垃圾分类工作中起到很重要的推动作用,经过垃圾分类投放、分类收集、分类运输、分类处理等环节将有回收价值的垃圾进行回收再利用,变废为宝。智能垃圾桶的使用不仅可以提高垃圾分类工作效率,还可以减少清洁工人的工作量。正确运用智能分类垃圾箱进行垃圾分类,是实现垃圾减量化和资源化的重要途径和手段,是有用处置垃圾的科学管理方法。
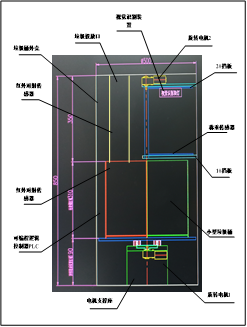
本项目研究内容是基于AI视觉识别及工业PLC控制的多功能垃圾智能分类装置,该装置由视觉识别装置、旋转电机、红外对射传感器、称重传感器、挡板、可编程逻辑控制器等组成(如下图所示)
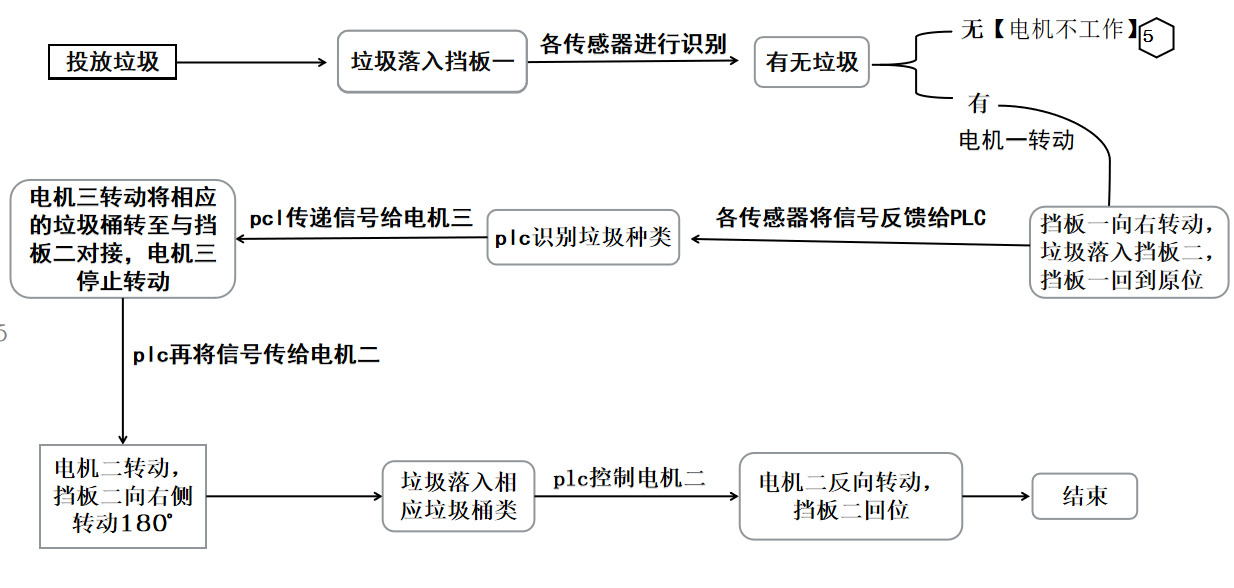
1)装置上电,恢复初始状态。此时挡板1、挡板2位均处于初始状态;旋转电机1、旋转电机2均不运作;。装置工作过程如下:
(2)投放垃圾(此处以蓄电池为例);蓄电池通过“垃圾投放口”投入到挡板1指定位置,蓄电池的活动空间范围控制在φ200mm的圆柱体内;
(3)称重传感器与激光对射传感器对被投放物进行检测,判断此时有物理落入挡板1;
(4)称重传感器与激光对射传感器将开关量信号反馈至可编程逻辑控制器PLC,PLC给旋转电机2启动信号,控制其旋转。
(5)旋转电机2动作,带动挡板2顺时针(逆时针旋转180度),与挡板1“重合”;
(6)PLC发出控制指令,启动视觉识别装置工作,视觉识别指示灯同步启动;
(7)视觉识别装置识别出垃圾种类,产生电信号并反馈至PLC控制器,PLC接收电信号并进行决策;
(8)PLC控制旋转电机1,根据垃圾种类判断旋转电机的旋转角度,确保小垃圾桶进入指定位置;
挡板1旋转,将垃圾倒入指定小垃圾桶;
(9)垃圾桶内设置激光对射传感器,若激光对射传感器持续监测到“垃圾已满”信息,反馈至PLC控制器,PLC对外输出语音报警;
针对以上工作过程,梳理流程图如下: