一、研究目的
黄花菜采摘智能一体化机器人,它可以自适应复杂地形环境,完成智能化检测成熟度并采摘,依靠物理和红外检测完成精准检测,还具有多机协同的智能化能力。机器人促进了黄花菜作物的高效率采摘,推动了产业的高效率、高效益发展,并对小农户进行劳动力的分担,促进小农户的更高经济收益。
二、主要研究内容
首先,是研究机器人的运动机构与控制系统。这包括设计可伸缩履带轮式结构,使其能够在不同高度、不同路面上稳定前行,并具备足够的负载能力以携带识别、采摘、分拣、和收集设备。同时,需要开发一套精准的运动控制系统,以实现机器人的精确定位和稳定运动。
其次,是研究定位、识别和检测技术的集成融合。这需要将多种传感器和检测设备以及识别设备集成到机器人上,如激高分辨率双视模型、潜望式高精度摄像机、视觉传感器、光谱UV传感器、位置传感器、温度传感器以及嗅觉传感器等,以实现黄花菜采摘、分拣作业。同时,需要开发相应的数据处理和分析软件,对检测数据进行处理和分析,以得出准确的检测结果。
还有机械臂的研究设计,我们设计了轻质化的机械臂,并且设计了柔性机械手与剪刀集成采摘机械臂,柔性触感分拣机械臂,内置位置传感器,六电机精准操控,可以做到精准悬停和无损拿取,在重量方面也做到了真正意义上的轻量化,机械臂底部采用快拆装置,可以做到急速组装、拆卸。
最后,是研究机器人的安全保障技术。由于机器人需要在不同路况的地面上进行作业,因此需要开发可靠的安全保障技术,以确保机器人在各种路况下都能稳定行走工作。此外,还需要研究紧急停机装置、防跌倒装置等,以确保在机器人出现故障或异常情况时能够及时停机并保护人员和设备的安全。
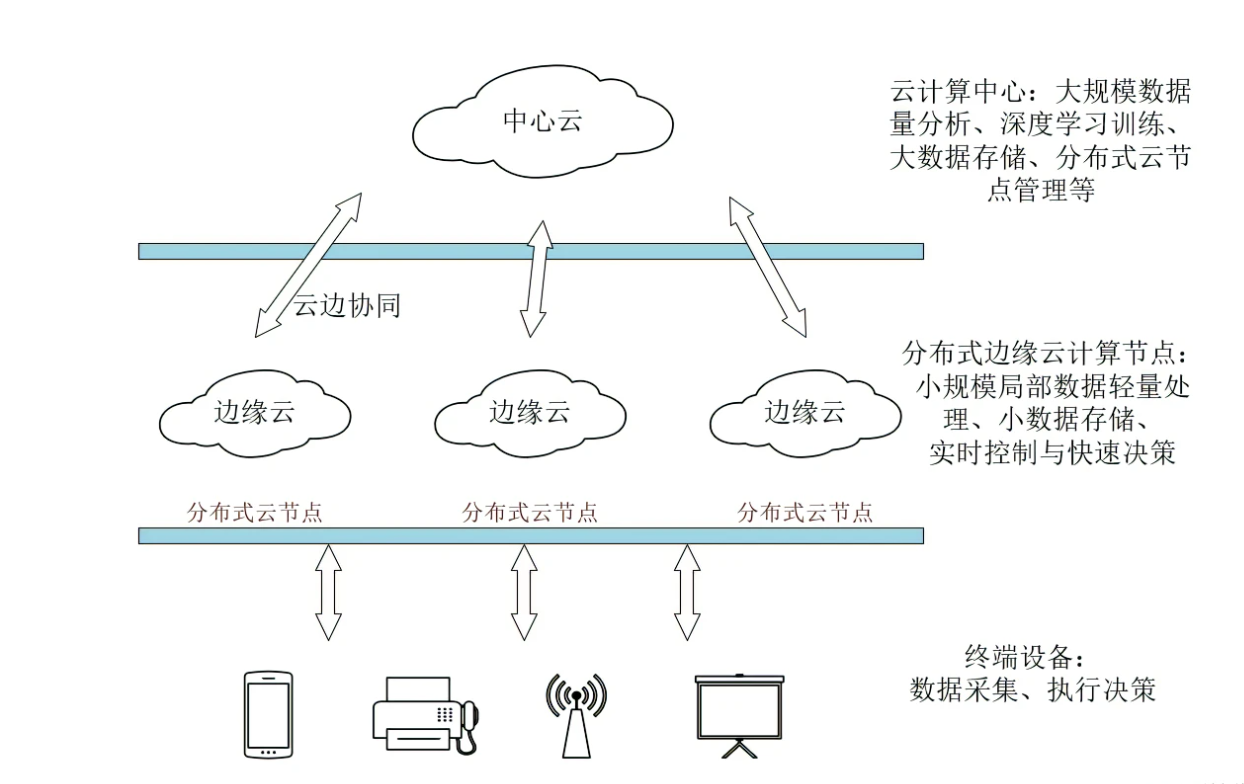
值得一提的是机器人所具有的“云-边-端”协同的智慧农业系统。端侧设备负责执行和采集数据;边缘侧进行实时数据处理和局部控制;云端进行大数据分析、模型训练优化、全局调度、远程监控与可视化。依靠人工智能分布式系统架构、5G/6G通信、时间敏感网络(TSN)、云计算与云原生技术、资源调度算法,实现多机协同作业。在大型农场,多个采摘机器人、运输机器人、监控无人机之间的任务分配、路径规划协同以避免冲突或重复工作。基于5G的远程集群调度与云端数据管理,低延迟、高可靠的通信保障,以及海量设备产生的数据在云端的实时处理与优化反馈,从而实现农场级的智能化管理,优化资源配置,提升整体运营效率,并为农业大数据应用提供基础。
在研究机器人的运动机构与控制系统方面,我们计划采用先进的伺服电机和精密的齿轮减速系统,大胆加入电磁控制系统,以保证机器人在操作过程中的动力输出和精确控制。控制系统将采用模块化设计,便于后期升级和维护。此外,我们还将考虑机器人的能耗问题,通过优化算法和使用高效能电池,添加光伏供电系统,以延长机器人的工作时间。
在定位、识别和检测技术的集成方面,我们将重点研究传感器的布局和数据同步问题,确保各种检测设备能够协同工作,提高检测效率和准确性。数据处理和分析软件将采用人工智能算法,以提高数据分析的速度和准确性,同时减少人为错误。
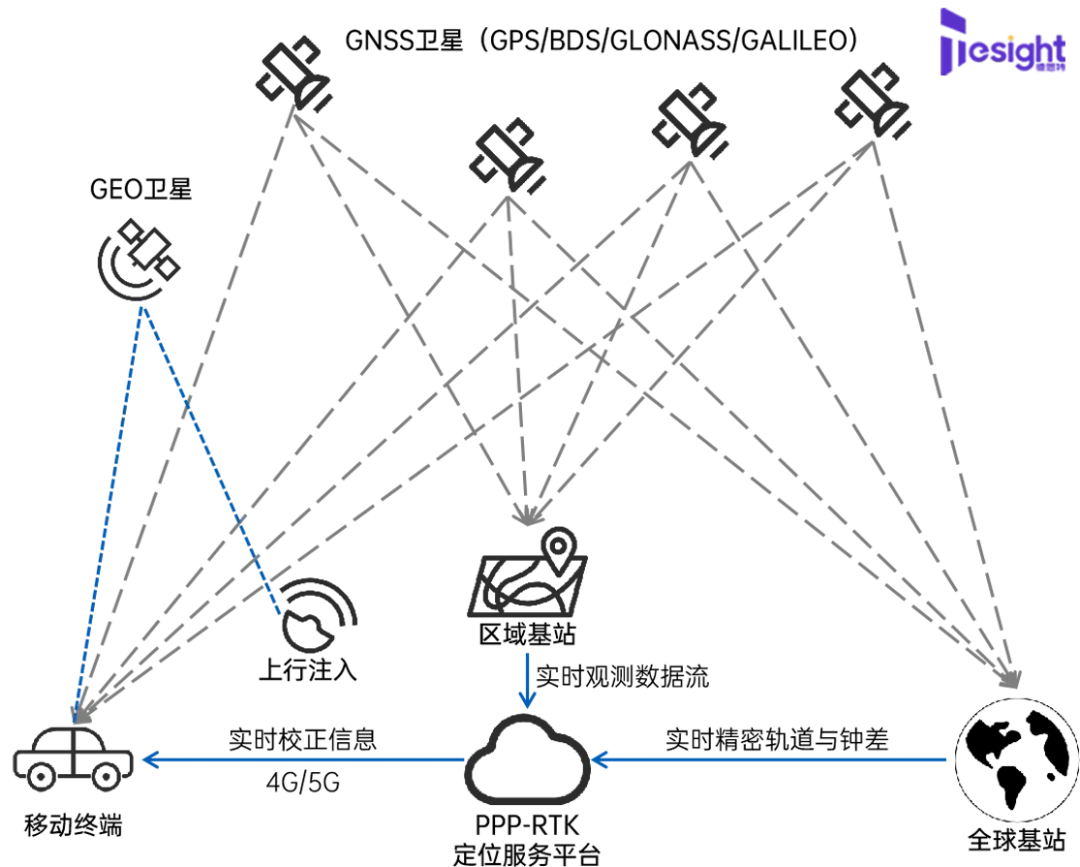
此外,我们还将研究机器人的自主导航和避障技术,使机器人能够在复杂环境中自主移动,避免与障碍物发生碰撞。黄花菜等作物的种植环境可能包含垄沟、坡地等不平整地形。摒弃目前的机器人多采用轮式底盘,采用履带式轮胎。其在湿滑、泥泞田间的通过性、稳定性以及自主避障能力加强。并将RTK-GNSS与激光雷达融合定位用于导航,加入的5G信号与北斗导航系统保障机器人在复杂植被覆盖下的信号稳定性和导航精度。
为了实现上述目标,我们计划采用多学科交叉的研究方法,结合机械工程、电子工程、计算机科学和人工智能等领域的最新技术,共同推动项目的进展。我们将组建一支由多学科专家组成的团队,共同攻克技术难题,确保项目的顺利实施。
在项目实施过程中,我们还将注重与工业界的合作,积极寻求与相关企业、研究所和高校的合作机会,共同推动技术创新和成果转化。通过产学研合作,我们将能够更好地理解市场需求,优化产品设计,提高产品的实用性和竞争力。
总之,我们将全力以赴,确保项目的顺利实施和高质量完成。我们相信,在团队的共同努力下,我们一定能够攻克技术难题,研发出具有自主知识产权的机器人产品,为农作物采摘、分拣一体化领域的发展做出重要贡献。
为确保项目的顺利进行,我们已制定了详细的时间表和阶段性目标。在项目初期,我们将集中力量进行机器人的基础设计和关键技术的预研,包括运动机构、控制系统、集成技术及安全保障技术的初步方案设计。通过多次的方案论证和实验验证,不断优化设计,确保每一个技术环节都达到预期的性能指标。
在项目中期,我们将进入样机的试制和测试阶段。这一阶段,我们将根据前期设计,制作出样机,并进行全面的功能测试和性能测试。通过模拟各种工况,验证机器人的行走稳定性、定位精度、识别准确性以及安全保障系统的可靠性。针对测试中发现的问题,我们将及时进行整改和优化,确保样机能够满足实际应用的需求。
在项目后期,我们将进行样机的实地应用测试和产业化推广的准备工作。我们将选择典型的黄花菜种植地应用场景,对样机进行实地测试,收集数据,评估其在实际应用中的效果和性能。同时,我们还将与潜在用户进行深入沟通,了解他们的具体需求,为产品的进一步改进和产业化推广提供有力支持。
此外,在项目实施过程中,我们还将注重知识产权的保护和管理工作。我们将及时申请相关专利,确保我们的创新成果能够得到有效的法律保护。同时,我们还将建立完善的知识产权管理制度,加强团队成员的知识产权意识,防止知识产权的流失和侵权行为的发生。
通过以上措施的实施,我们有信心能够顺利完成项目的各项任务和目标,研发出具有自主知识产权的机器人产品,为为农作物采摘一体化领域的发展做出积极贡献。
综上所述,采摘、分拣智能自动化一体机器人在提高作业效率、保障卫生安全、减少劳动力等方面具有重要意义,同时其智能化、自主化、适应性和灵活性以及数据记录和分析功能也为农场带来了更多的便利和价值。此外,采摘、分拣智能自动化一体机器人在实际应用中还展现出了出色的稳定性和可靠性。其坚固耐用的结构和优质的碳纤维材料的选择,确保了机器人在恶劣环境和长时间作业下的稳定运行。即使在极端天气条件下,如高温、低温、潮湿等,机器人也能保持良好的工作状态,不受外界因素的干扰。
三、项目拟解决问题的途径;
首先我们确保了机器人能在不同地形路面上稳定前行并进行精确的识别、定位。双侧可伸缩履带轮的应用不仅增强了机器人的稳定性,提升了其负载能力,还增强了机器人的自适应无障碍通行能力。此外,通过改进机器人的运动控制系统,我们实现了对机器人精确控制和定位的能力,进而提升了作业的效率和准确性。
其次,通过集成多种传感器和检测技术,我们实现了对黄花菜花蕾的精准识别、定位和检测。高分辨率双视模型、潜望式高精度摄像机、视觉传感器、光谱UV传感器的集成,使得机器人能够对黄花菜花蕾的大小、位置、成熟度进行详尽的检测。同时,我们开发了相应的数据处理和分析软件,能够实时处理和分析检测数据,及时根据数据进行调整。
最后,我们还配备了紧急停机装置和防跌倒装置等安全措施,确保在机器人出现故障或异常情况时能够迅速停机,并保护人员及设备的安全。为了进一步提升机器人的智能化水平,我们正着手研发自主导航与智能避障系统。该系统将融合先进的视觉识别技术与深度学习算法,使机器人能够自主规划最优路径,有效避开障碍物,即使在复杂多变的山地环境中也能游刃有余地完成各项任务。
同时,为了增强机器人的续航能力,我们正探索采用更高能量密度的锂电池技术以及创新的光追光伏供电系统。这将大幅度延长机器人的单次作业时间,减少频繁充电的需求,从而进一步提升整体工作效率。
此外,针对特定行业的需求,我们还计划开发定制化的功能模块。比如,在果蔬采摘领域,机器人可以配备专用的水果采摘机械臂,以更精准、无损的实现对果蔬的采摘
最后,为了提升用户体验和操作的便捷性,我们将持续优化人机交互界面,引入更直观的操作指令和反馈机制。同时,提供云端管理平台,用户可以通过手机或电脑远程监控机器人的工作状态,接收实时数据报告,实现更加高效的项目管理和决策支持。
综上所述,我们的目标是不断推动技术创新,为了增强机器人的环境适应性和灵活性,我们正致力于研发先进的自适应调节机制。这一机制将使机器人能够根据不同路况,甚至天气条件,自动调整其运动策略,确保在任何环境下都能保持卓越的工作性能。
在数据传输与安全性方面,我们也正积极引入最新的加密技术和高速通信技术。这不仅确保了机器人采集的数据在传输过程中的安全性和完整性,还大大缩短了数据传输的时间,使得用户可以更及时地获取到检测结果,并据此作出反应。
另外,考虑到维护和保养的便捷性,我们正在设计易于拆卸和更换的模块化组件。这将使得用户能够轻松地对机器人进行日常维护和故障排查,大大降低了维护成本和停机时间。
为了推动这一技术的广泛应用,我们还将加强与行业伙伴的合作,共同制定标准化的操作规范和技术标准。这不仅有助于提升整个行业的技术水平,还将促进WPSAI驱动的机器人系统在更多领域的推广和应用。
总之,我们正以创新为驱动,不断优化和完善WPSAI驱动的机器人系统,致力于为用户提供更高效、更精准、更智能的农产品采摘、分拣一体化解决方案。我们期待与更多行业伙伴携手共进,共同推动这一领域的进步和发展。
四、核心原理
黄花菜采摘智能自动化一体机器人主体采用上下双层结构,上层为采摘一体化模块,下层为可伸缩履带轮制动模块。基于RF905SE芯片的无线通讯系统远程控制。上层的采摘模块可相互独立,单独与下层制动模块相组合,且接口全部采用统一快拆口。采摘模块主要由柔性机械手与剪刀集成采摘机械臂和检测定位模块构成,由检测定位系统对黄花菜进行定位识别,将数据传输至智能中控,从而控制机械臂进行采摘。检测识别首先由高分辨率双视模块进行初步检测,由YOLOv12模型进行定位,视觉模块集成了多组视觉传感器,配合潜望式摄像机对黄花菜周围的环境进行模拟分析,从而精确黄花菜花蕾的具体位置及形状,在图像方面,光谱传感器对黄花菜的成像进行描边处理,向智能中控生成原图、黑白图、描边图、精确定位采摘口裁切图等四张照片,由人工智能进行分析,配合嗅觉传感器对黄花菜气味的识别从而判断黄花菜是否已经达采摘标准。数据无误后将操控机械臂自主采摘,机械臂前端设计有位置传感器和视觉传感器,配合所计算出来的位置,由柔性机械手进行拿取,剪刀臂进行剪切,再由机械手放置后方传输带,从而完成一次采摘作业,四机械臂同时协调作业,保证效率。在每次的采摘作业完成后,都会记录数据传输云端,作为数据的收集处理。另外,所有机械臂都采用电机驱动,由微电机细调,多电机协同控制,配合中控系统,做到类防生机械操控模式,还大胆在机械手上采用电磁操控,可以做到毫米级操控,机械手前端都有触觉传感器,可以做到轻拿轻放、无损拿取。在上层模块下面设有供电系统,由锂电池及光追系统组成,锂电池可以稳定为机器人实现10小时供电,采用快充协议,做到快速恢复,高效率投入;同时光追系统中的感光模块实时检测太阳光方向,控制太阳能板进行转向,保证时刻接收光照,进行小型光伏发点,利用绿色能源为机器人实现高续航。下层的制动模块由可伸缩杆和履带轮两部分构成。可伸缩杆配合前方的激光雷达,引入RTK-GNSS与激光雷达融合定位用于导航,另外还有北斗导航定位,可以实时计算路况,遇到高低树枝,可以提前升降,实现无障碍通行。履带轮采用橡胶履带轮,在恶劣路面可以不被轻易损坏,可在崎岖路面平稳前进。







