- “智净”智能扫地机器人:
以Arduino Uno为核心,集成超声波避障、红外灰尘检测等传感器,通过手机APP实现多种清洁模式、自定义区域清洁及状态监控,清洁效率较人工提升数倍,适用于家庭、办公等场景,未来可拓展AI算法与多模态交互,推动家居清洁智能化升级。
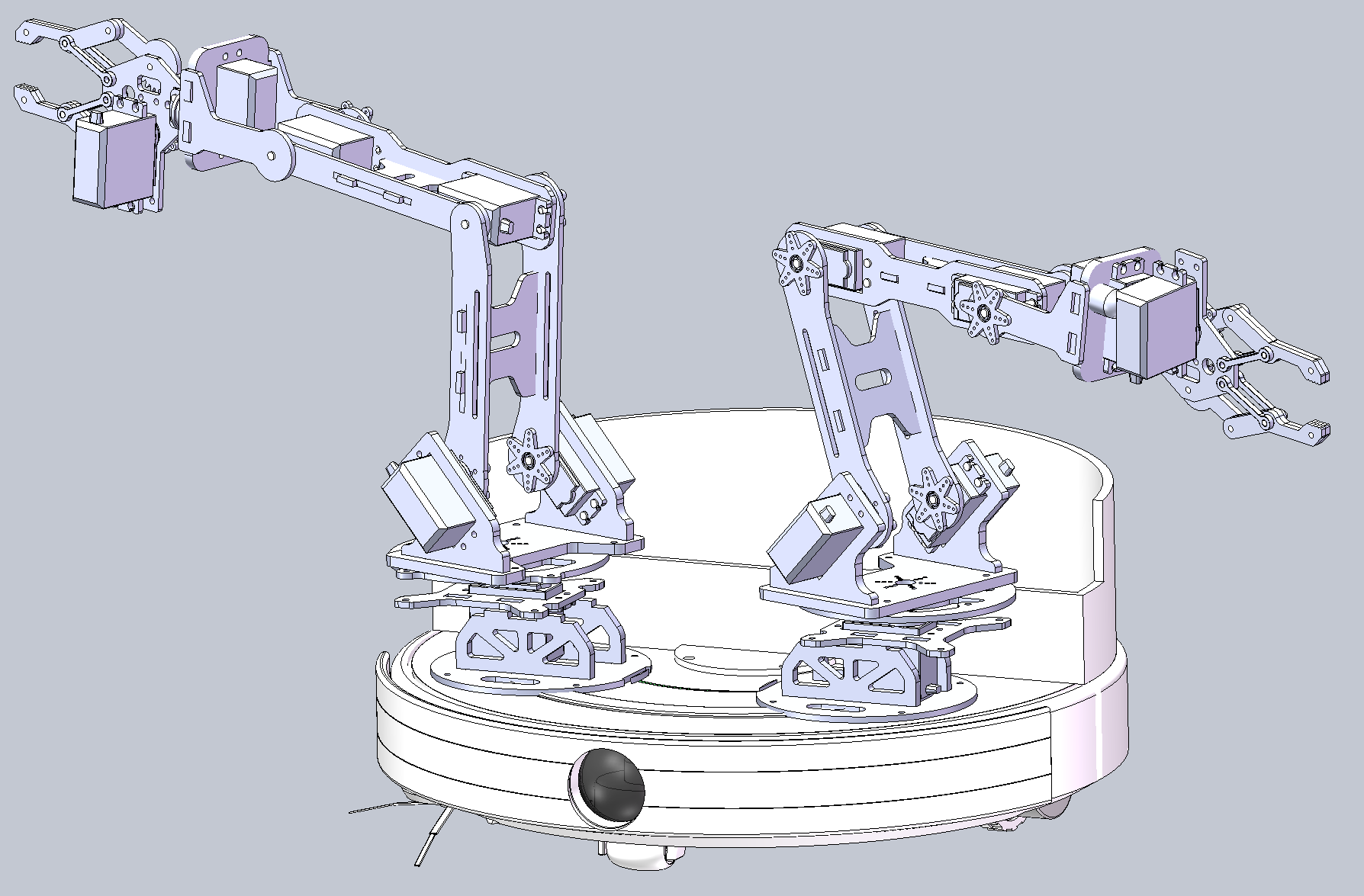
- “双擎智控”多任务协作机器人系统:
采用双多自由度机械臂+智能移动底盘架构,机械臂模块化关节设计保障精准操作,移动底盘具备自主导航能力,二者协同可完成工业分拣组装、科研样品处理等复杂任务,为工业自动化、科研实验、智能服务等领域提供高效解决方案,体现机械与智能控制技术的深度融合。
一、项目背景
(一)行业现状
家庭、办公室等场所传统人工清洁存在效率低下、劳动强度大、清洁效果不稳定等问题。随着人们生活节奏的加快和对生活环境要求的提高,传统清洁方式已难以满足多样化的清洁需求。
(二)技术发展趋势
电子、自动化控制及传感器技术快速发展,Arduino Uno 开源平台凭借丰富接口和低成本特性成为理想开发工具。超声波传感器、红外传感器与电机驱动模块的成熟应用,为扫地机器人的智能化升级提供了技术支撑。
二、研究目的
1. 提高清洁效率:通过硬件自动化与算法优化,实现快速高效清洁,减少人工清洁时间。
2. 保证清洁效果稳定:利用精确传感器和标准化程序,避免人为误差,确保清洁一致性。
3. 提供智能化服务:通过导航算法和自动回充功能,满足不同场景清洁需求,增强使用便利性。
4. 提升科技感与吸引力:以智能化设备提升生活品质,吸引科技爱好者和追求便捷生活的消费群体。
三、作品设计思路
(一)整体架构规划
采用模块化设计,包含以下核心模块:
1. 主控模块:Arduino Uno 负责指令解析与设备协调。
2. 传感模块:超声波传感器、红外传感器实现环境感知。
3. 驱动模块:直流电机(配编码器)控制轮子转动,实现移动与转向。
4. 人机交互模块:手机 APP 为主,机器人本体指示灯与显示屏辅助反馈状态。
(二)硬件选型与连接
|
模块
|
组件
|
功能说明
|
|
主控模块
|
Arduino Uno
|
基于 ATmega328P,通过数字 / 模拟引脚连接外设,USB 接口调试程序。
|
|
传感模块
|
超声波传感器
|
测量与障碍物距离,避免碰撞。
|
|
|
红外传感器
|
检测地面灰尘与悬崖,实现精准清洁与防跌落。
|
|
驱动模块
|
直流电机 + 编码器
|
编码器反馈电机转速,实现闭环控制;直流电机驱动轮子移动。
|
|
|
万向轮
|
辅助机器人转向与移动。
|
|
电源模块
|
12V 锂电池 + 降压模块
|
为系统供电,降压模块输出 5V 为传感器供电。
|
(三)软件功能设计
1. 手机 APP(用户界面)
开发技术:Android Studio 实现响应式设计。
功能模块:
5. 清洁模式选择:分类展示自动清洁、定点清洁、沿边清洁,支持搜索与详情查看。
6. 自定义设置:用户自定义清洁区域、清洁时间,保存个性化设置。
7. 系统状态查询:查看设备运行状态、电量、清洁进度。
1. 主控程序(Arduino)
核心逻辑:
8. 接收手机 APP 指令,解析后执行相应清洁模式。
9. 通过传感器反馈控制电机转动,实现导航与避障。
10. 按设定模式控制清洁组件工作,实时监测设备状态,异常时停止操作并通过蓝牙反馈至手机 APP。
(四)系统集成与调试
1. 硬件调试
11. 校准电机:通过编码器确定初始位置,确保移动精度。
12. 传感器校准:测量不同距离下传感器读数,校准传感器精度。
1. 软件调试
13. 导航算法优化:调整电机速度与转向参数,减少导航误差。
四、作品硬件结构
(一)主控模块
14. 核心组件:Arduino Uno 开发板
15. 接口连接:
16. 数字引脚:控制电机方向、脉冲,传感器信号输入。
17. 模拟引脚:预留扩展传感器。
18. 串口 (TX/RX):连接蓝牙模块。
(二)传感模块
19. 功能:感知环境,实现避障与导航。
20. 传感器类型:
21. 超声波传感器:测量前方障碍物距离。
22. 红外传感器:检测地面灰尘与悬崖。
(三)驱动模块(直流电机 + 编码器)
23. 闭环控制流程:
i. Arduino 发送目标速度至直流电机。
ii. 编码器实时读取电机转速,通过脉冲反馈至 Arduino。
iii. 主控板计算速度误差,调整脉冲输出,直至到达目标速度(误差 <±1%)。
(四)电源模块
24. 供电方案:
25. 12V 锂电池(容量≥3000mAh):降压 5V 为传感器供电,直接驱动电机。
26. 备用电源接口:支持外接电源适配器,确保长时间连续工作。
五、作品软件实现
(一)手机 APP 关键代码
|
<IDOCTYPE html>
<html lang="zh-CN">
<head>
<meta charset="UTF-8">
<meta name="viewport" content="width=device-width, initial-scale=1.0">
<style>
<title>扫地机器人控制台</title>
margin:0;
body{
background-color:#f0f2f5;
display: flex;
justify-content: center;
align-items: center;
min-height:100vh;
background-image: linear-gradient(135deg,#f5f7fa 0%,#c3cfe2 100%);
margin: 0;
}
.container{
background: white;
border-radius: 15px;
box-shadow:0 0 20px rgba(0,0,0,0.15);
width:100%;
max-width: 800px;
}
h1{
color:#1a73e8;
text-align: center;
margin-bottom: 1.5rem;
}
.clean-section {
margin-bottom: 2rem;
}
</style>
</head>
|
(二)APP 界面展示
智能扫地机器人控制台
清洁模式
自动清洁 定点清洁 沿边清洁
预约设置
定时清洁 区域清洁
清洁进度
已清洁面积:50 平方米 剩余电量:80%
六、测试与评估
(一)硬件测试
|
测试项
|
方法
|
标准
|
|
电机转速精度
|
测量电机实际转速与目标转速
|
误差≤±1%
|
|
传感器检测距离
|
在不同距离下测量传感器读数
|
误差≤±5%
|
|
蓝牙通信稳定性
|
连续发送 100 条指令,统计丢包率
|
丢包率 < 1%
|
(二)整体评估
27. 效率对比:机器人清洁平均耗时 15 分钟 / 100 平方米,人工清洁需 1-2 小时 / 100 平方米。
七、应用前景与展望
(一)商业应用场景
1. 家庭场景:家庭部署可提升生活品质,降低家务劳动强度。
2. 办公场所:办公室使用可实现无人化清洁,提高办公环境舒适度。
3. 商业场景:商场、酒店等场所作为智能化服务亮点,提升服务质量。
(二)技术升级方向
1. 智能化扩展:集成 AI 算法,根据清洁历史推荐清洁模式;接入语音助手(如小爱同学)。
2. 多模态交互:增加手势识别(如挥手启动 / 暂停)、触摸屏控制,适配不同用户习惯。
3. 模块化升级:设计可替换清洁单元(如增加拖地、打蜡模块),支持功能快速扩展。
(三)社会影响
28. 推动家庭服务向智能化转型,催生 “机器人运维师”“清洁算法工程师” 等新职业。
29. 降低家庭清洁门槛,促进智能家居文化普及,同时通过智能化清洁引导高效生活方式。
八、结论
基于 Arduino Uno 的扫地机器人通过硬件模块化与软件智能化设计,有效解决了传统清洁效率低、效果不稳定的问题。通过蓝牙和手机 APP 的升级,系统易用性与可扩展性显著提升,经测试验证其在效率、精度和用户体验方面表现优异。未来结合 AI 与物联网技术,该机器人有望成为智能家居的标杆设备,推动行业变革。
九、模型展示