一、开发背景
玉米是我国种植面积排名第一的粮食与经济作物,其中山地玉米在保障国家粮食安全中具有重要作用。但山地地形复杂、栽培条件苛刻,当前山地玉米收获主要依赖人工,存在效率低、劳动强度大的问题;传统玉米收获机多采用柴油机驱动,不仅排放污染物多、噪音大,且机身笨重、越野性能差,难以适应山地颠簸地形,无法满足山地玉米收获的特殊需求。
为解决上述痛点,本产品应运而生——以“适应山地、环保高效、减轻农劳”为核心目标,开发小型化、山地适配的玉米收获机,采用电动机驱动替代柴油机,搭配履带式行走结构,优化核心工作部件,旨在填补山地玉米机械化收获的设备空白,推动山地农业机械化与可持续发展。
二、结构说明
本收获机基于“简化结构、强化山地适配性”设计,总体尺寸为1095mm(宽)×2810mm(长)×1002mm(高),核心结构分为动力系统、传动系统、核心工作装置、支撑行走系统、控制部件五大模块,具体如下图所示
图1. 山地适配型玉米收获机
动力系统
直流无刷电动机(型号HY100B3/5-72V) 额定功率2.2kW,同步转速1500r/min,满载转速1430r/min,无尾气排放,噪音比柴油机降低50%以上,适配山地作业的低污染需求。
传动系统
四级传动(带Ⅰ传动→链传动→带Ⅱ传动→锥齿轮传动) 总传动比11.3,各级传动分工:带传动缓冲减振、链传动承载大载荷、锥齿轮改变传动方向,确保动力平稳传递至工作部件。
核心工作装置
1.摘穗装置:摘穗辊(间隙20mm,分引入/摘穗/强拉段)、直齿轮、锥齿轮。
2.压送装置:压送轴(带5个星型轮,间距54mm)、链轮、带轮。
3.存储装置:Q235材质存储箱(350mm×430mm×466mm)+箱盖
支撑行走系统
机架:上机架(碳钢,连接压送/存储装置、电机)、下机架(碳钢,连接摘穗装置、履带)
2.履带式行走机构+UBPFL206外球面球轴承。
三、功能与使用说明
(一)核心功能
山地适配功能:履带式行走机构+紧凑机身,可在山地复杂地形(坡度、颠簸路面)平稳行驶,解决传统机械“难上山、易卡壳”问题。
高效摘穗功能:优化摘穗辊结构(间隙20mm,三段式设计),配合直齿轮+锥齿轮动力传递,自动化完成玉米秆喂入、果穗分离,摘穗率达95%,籽粒破碎率低,替代人工摘穗,效率提升3倍以上。
平稳压送功能:压送轴带动星型轮旋转,将分离后的果穗平稳压送至存储箱,输送过程无卡顿,适配不同大小的玉米果穗。
临时存储功能:存储箱容量适配小型山地作业需求,临时存放果穗减少频繁卸粮次数,减轻农户劳动强度。
环保低噪功能:电动机驱动无尾气排放(对环境影响较柴油机降低90%以上),运行噪音低,适配山地周边生态保护需求。
(二)使用说明
1.开机前检查
传动部件:检查带Ⅰ/带Ⅱ(A型/B型橡胶V带)的张紧度,链条(12A型滚子链)的润滑情况,确保无松动、断裂;
工作部件:确认摘穗辊间隙为20mm,星型轮无变形、键连接牢固,存储箱箱盖关闭到位;
动力部件:检查电动机电源(72V)电量,轴承(7206C/7207C角接触球轴承)润滑状态,无异常声响。
2.操作流程
启动:接通电动机电源,通过把手控制收获机前进方向,调整至玉米种植行,使玉米秆对准摘穗辊引入段;
收获:收获机缓慢前进(适配玉米植株密度),摘穗辊自动喂入玉米秆,分离果穗后,果穗经星型轮压送进入存储箱;
卸粮:当存储箱装满后,停机并打开箱盖,将果穗卸至运输工具(如农用车),完成后关闭箱盖即可继续作业;
停机:作业结束后,切断电动机电源,清理摘穗辊、压送轴上残留的秸秆,检查零部件是否磨损。
对象定位
本设计的核心对象是专为山地复杂地形研发的小型化玉米收获机,聚焦山地玉米收获的“特殊痛点”:
山地地形颠簸、狭窄,传统大型收获机(机身重、越野性差)无法通行;
现有收获机多为柴油机驱动,尾气污染大、噪音高,不符合山地生态保护需求;
山地玉米收获长期依赖人工,效率低(人均日收获量有限)、劳动强度大(弯腰摘穗、搬运)。
因此,产品定位为“轻量化、环保型、山地适配”的小型机械,核心功能覆盖“玉米果穗摘穗-输送-临时存储”,目标是填补山地玉米机械化收获的设备空白,推动山地农业机械化升级。
二、设计原理
设计原理围绕“动力传递-核心部件协同工作”展开,通过分系统原理设计,确保整机实现“高效摘穗、平稳输送、安全存储”的核心功能,具体如下图2.二维示意图所示。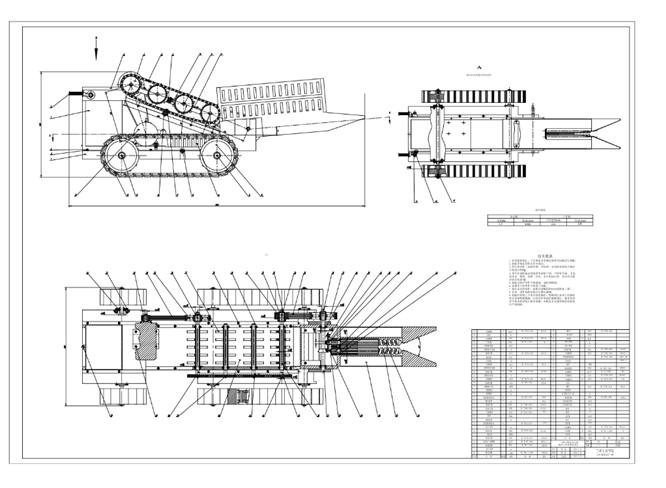
图2.二维示意图
1.动力驱动原理
动力源选择逻辑:放弃传统柴油机,采用直流无刷电动机(型号HY100B3/5-72V),利用其“无尾气排放、噪音低(比柴油机降低50%以上)、调速性能好、轻量化(质量34kg)”的优势,适配山地“环保要求高、空间狭窄”的作业场景;
动力传递逻辑:电动机输出动力后,通过“四级传动系统”逐步传递至各工作部件,避免动力冲击,确保运行平稳——四级传动分工明确,既解决“动力衰减”问题,又适配整机结构布局。






