一、研究背景与意义
(一)产业现状
我国丘陵山区果园占果品生产的重要地位,但地形复杂、机械化水平低,植保作业难度大。中国地域辽阔,林果资源丰富,其中,柑橘、苹果、梨、葡萄以及香蕉是我国五大主产水果。据《中国统计年鉴-2023》的数据显示,截至 2022 年,我国水果种植面积达到13010千公顷,水果产量高达 31296.2 万吨,两项数据呈持续上升的态势,果品种植例如苹果等 主要集中在丘陵山区,这些地区适合发展水果产业,已经成为丘陵山区乡村振兴、脱贫攻坚的支柱产业。近年来,果品产业人员短缺,人口老龄化严重,导致果园生产成本逐年增加,受地形地貌、种植方式等因素的限制,多数果园依然采用传统人力劳动管理模式,林果生产机械化水平总体低于20%。
我国在 20 世纪 80 年代引进了风送式果园喷雾机,它在我国植保机械的发展过程中起着重要的作用。与传统的液压喷雾相比,风送系统的辅助可携带 药液雾滴输送至果树冠层,增强雾滴的覆盖率及穿透性,提高机器作业效率,称之为果园植保的第一次革命。风送式喷雾机在植保领域喷雾效果较好,作业效率高,但也存在诸多问题。现果园使用的传统风送式喷雾机采用轴流式风机,挡板式圆形出风口结构,在带来强大的气流的同时,也会引起外气流场风速分布不均匀,导致出现雾滴飘移现象。再者,风送式喷雾机在植保作业时,存在喷雾液滴分布不均匀的难题,雾滴主要集中在果树冠层的中下方,顶部叶片的雾滴密度沉积较差。另外,由于果树冠层存在一定的“叶壁效应”和“湍流效应”,这种效应会阻 挡风和液滴进入果树内部,致使树冠内部和叶片背部雾滴覆盖率较低。国内外对智能喷雾装备的研究逐渐深入,但针对丘陵山区复杂地形的专用设备仍存在技术空白。
(二)国内外对比
1.轨道运输机械发展
国外轨道运输机械技术成熟,应用广泛。德国1903年推出悬挂式单轨运输车,日本1966年研发出陡坡单轨运输机,韩国1994年成功开发森林单轨运输机。这些机械具有运行平稳、载重量大、爬坡能力强等特点。相比之下,我国20世纪70年代引入轨道运输机械,近年来在丘陵山地果园机械化领域取得进展,但仍需提升智能化水平。
2.风送式喷雾机技术
国外风送式喷雾机技术起步早且成熟,多采用塔式或隧道式设计,优化气流分布以减少飘移,提高雾滴沉积效率。例如,美国履带式轴流喷雾机喷幅可达18米以上,意大利隧道式循环喷雾机通过封闭式气流循环显著降低飘移率。我国20世纪80年代引入该技术,近年来通过CFD仿真技术优化风送系统,但仍需进一步提升智能化、精准施药和适应复杂地形的能力。
2.智能化与精准施药技术
国外果园喷雾机已实现高度自动化,部分设备配备激光扫描、变量喷雾和智能避障功能。例如,荷兰开发的变量喷雾系统可根据树冠特征动态调整喷雾参数。国内在智能喷雾领域取得突破,但整体仍处于试验阶段,与国外全自动化和精准施药技术存在差距。
3.雾滴飘移控制技术
国外研究机构通过CFD仿真与风洞试验,开发了多种防飘移装置,如德国的V型防飘喷雾装置和意大利的隧道式循环喷雾机,有效降低雾滴飘移率。国内研究多集中于CFD仿真优化,实际田间应用中飘移控制效果仍需验证。
(三)行业痛点
1.喷雾机与丘陵果园农艺结合不足
丘陵果园地形复杂,坡度大、地块分散,植保机械难以适应复杂地形,导致作业效率低下。现有智能植保机械多处于试验阶段,与实际丘陵果园作业需求结合较差,难以满足高效植保的要求。同时,丘陵果园喷雾机在陡坡和复杂地形中的稳定性和机动性不足,难以满足丘陵果园多样化的作业需求。
2.风送系统性能不足
传统风送式喷雾机产生的气流场存在低速区域明显、射流方向风速分布不均匀的问题。这种现象导致雾滴飘移现象严重,农药分布不均匀,既浪费农药资源,又可能对环境造成污染。此外,国内外虽已开发多种防飘移装置,但在实际田间应用中,飘移控制效果仍需进一步验证。
3.植保作业效果差
由于果树冠层存在“叶壁效应”和“湍流效应”,气流和雾滴难以穿透冠层内部,导致树冠内部和叶片背面的雾滴覆盖率较低。这种现象不仅降低了农药利用率,还加剧了农药浪费和环境污染问题。
4.自动化与智能化水平低
国内果园喷雾机大多仍依赖人工操作,果农直接接触农药,存在健康安全隐患。现有喷雾机缺乏稳定安全的操控系统,自动化和智能化水平较低,难以适应现代化果园的高效植保需求。与国外全自动化和精准施药技术相比,国内智能喷雾设备仍处于试验阶段,存在较大差距。
(四)价值意义
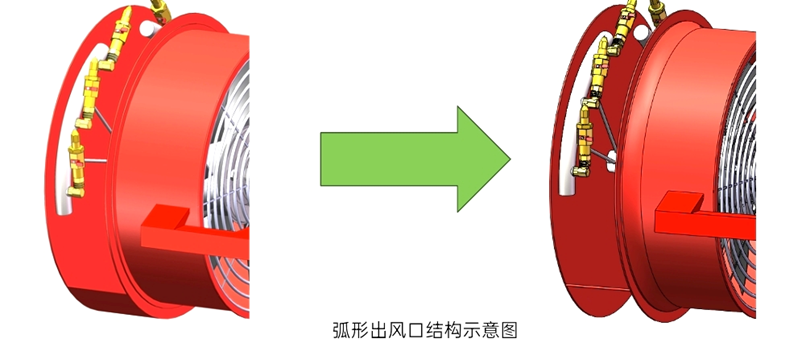
本项目旨在对丘陵果园单轨遥控喷雾机的整体方案、风送系统优化、摇摆喷雾结构设计等进行研究,通过对喷雾机的风送系统设计一种弧形出风口结构和对喷雾机的喷雾系统设计一种摇摆喷雾结构,实现喷雾作业的自动化和智能化,减少对人工的依赖,降低人工成本,减少农药浪费和环境污染,提高作业效率,推动丘陵果园机械化和智能化发展,为实现乡村振兴和农业现代化奠定基础。
二、项目研发目标
(一) 总体设计方案
根据果树管理的植保农艺要求,结合计算机数值模拟仿真技术,研制一款丘陵果园单轨遥控喷雾机,对其风送系统及关键部件进行优化设计与田间试验。总体设计方案如下:
(1)丘陵果园单轨遥控喷雾机整体方案设计。对喷雾机进行三维建模,并对其部件展开设计与选型,包括喷雾机的风送系统、喷雾系统、轨道系统及控制系统。整机运行平稳,可实现喷雾机自动化作业。
(2)基于 Fluent 的风送系统结构优化与仿真。设计一种弧形出风口,采用 CFD 数值模拟与试验验证的方法对风送系统的内流场进行对比分析研究,对距出风口不同距离的截面测量风速,对比结构优化前后风送系统外流场风速分布特性,利用集雾槽收集雾滴水平分布情况。
(3)针对果园轴流风送式喷雾机,设计一种摇摆喷雾结构。摇摆喷雾采用无急回特性的曲柄摇杆机构,对其进行运动学分析和运动学仿真分析,验证摇摆结构的稳定性。通过 Fluent 对摇摆喷雾过程进行了气液两相流的仿真,利用椭圆形区域捕捉雾滴 沉积个数。
(4)对喷雾机开展摇摆性能试验,结合响应面法,在试验园中进行单因素与多因素试验,探究喷雾机喷雾距离、行进速度及喷头摇摆速度对雾滴沉积量的影响。在苹果试验园与示范基地进行田间试验,结果满足丘陵果园植保要求。
(二)拟解决的问题
1. 如何优化风送系统结构,减少低速区域和雾滴飘移。
2. 如何设计摇摆喷雾结构,提高叶片背面雾滴覆盖率。
3. 如何实现远程遥控与自动化作业,提升设备的智能化水平。
三、研究解决方案
(一) 总体架构
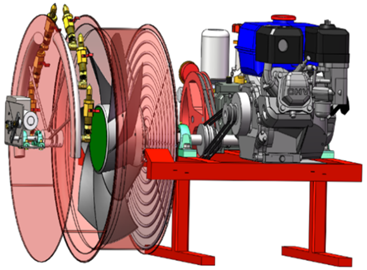
丘陵山地果园喷雾机主要由远程控制系统、轨道牵引系统、摇摆系统、喷雾系统 和风送系统等组成,通过理论计算,仿真模拟与实地试验方法设计不同机构的位置关 系,形成安全可靠的整机系统。整机结构如下图所示。
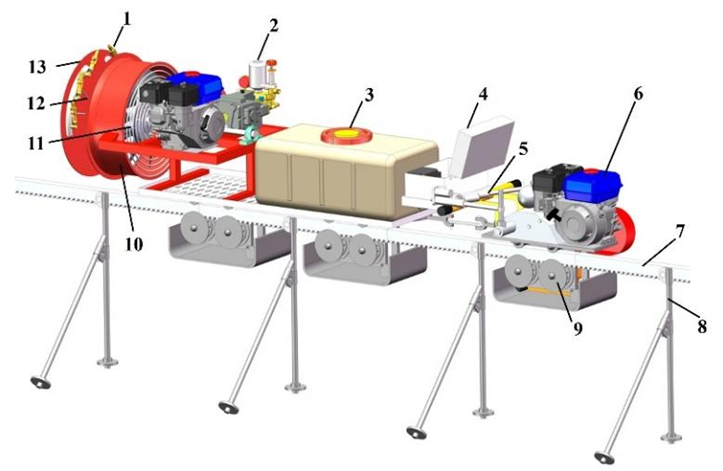
1喷头 2. 柱塞泵 3. 药箱 4. 控制箱 5. 电动推杆 6. 发动机 7. 轨道 8. 轨道支撑杆 9. 驱动销轮 10. 风筒 11. 风扇 12. 摇摆结构 13. 挡风板
丘陵果园喷雾机通过创新设计,适应复杂地形,爬坡能力强,运行稳定。其高效喷雾系统结合优化的弧形出风口和摇摆喷雾结构,显著提高雾滴覆盖率和均匀性,减少飘移和农药浪费。远程遥控和PLC控制系统实现自动化操作,降低果农劳动强度和农药接触风险。模块化设计和大容量药箱提升作业效率,整体安全可靠,为丘陵果园机械化植保提供重要技术支
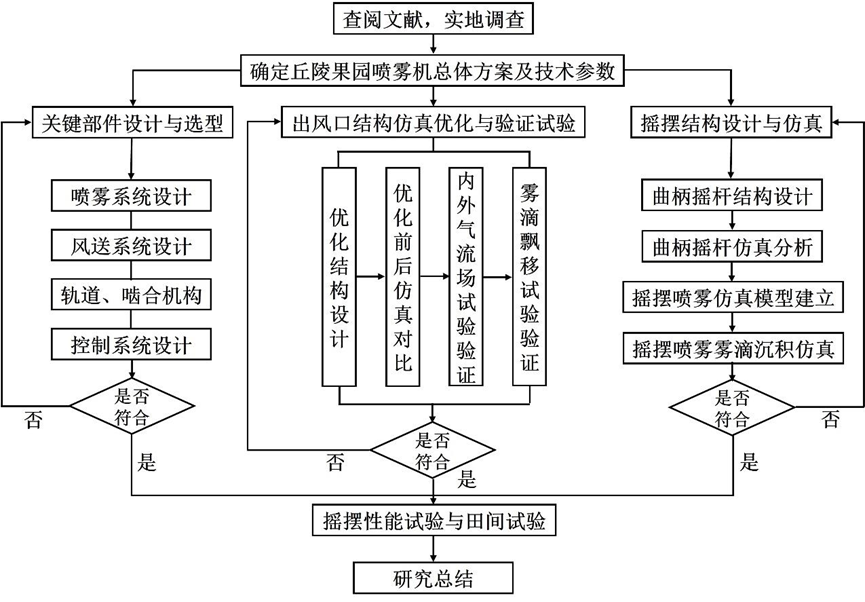
(二) 技术路线
根据本课题的研究内容,技术路线如下图所示。
四、工作原理
丘陵果园喷雾机将轨道牵引系统作为行进装置,它与远程控制系统相互配合,果农实现丘陵山地大范围远程遥控。摇摆系统、喷雾系统及风送系统是喷雾机植保作业的核心部件。
弥雾机构置于其上方,带动弥雾机构穿梭丘陵山地实现植保作业。轨道牵引机构通过汽油机将动力传输至变速箱,利用变速箱进行减速,控制轨道啮合机构中驱动销轮转动,通过轨道齿条与驱动销轮的啮合关系,带动整机的运行。轨道结构及啮合机构的结构如图: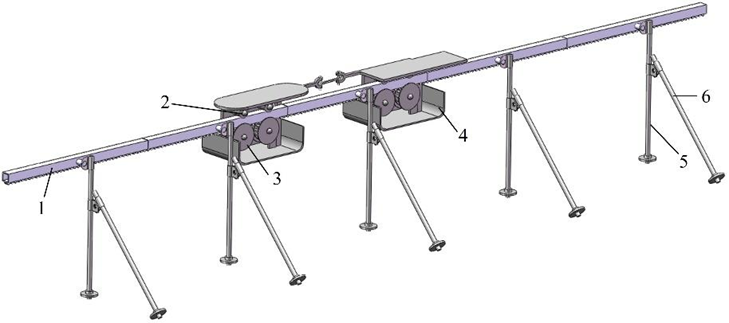
1. 轨道 2. 承重轮 3. 驱动销轮 4. 保护罩 5. 主支撑杆 6. 辅助支撑杆
弥雾机构采用果园轴流风送式喷雾机,利用汽油机的动力带动柱塞泵和轴流风机工作,雾滴借助于压力泵压力从喷头喷出形成第一次雾化,后经轴流风机的风力携带雾滴进行二次雾化。另外,强劲的风力吹向果树叶片,增加叶片的扰动效果,可提高叶片上雾滴的沉积量。
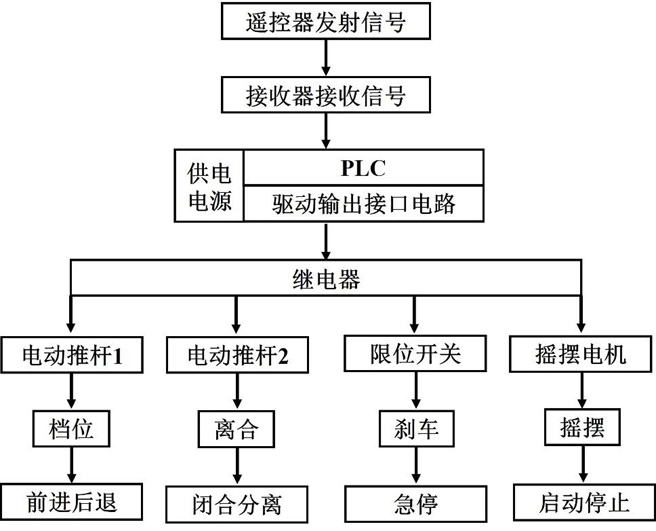
控制装置主要由控制箱与电动推杆构成,电动推杆连接控制轨道车的进退与启停。 控制箱内装有 PLC 及继电器,通过控制继电器的通断,实现电动推杆的伸缩与喷头的 摇摆喷雾。利用信号收发器,实现远程遥控。弥雾机左右各四个喷头携带独立开关, 根据果树种植高度及密集性,可控制喷雾角度和喷雾量。控制系统流程如图:
五、核心技术创新
1.风送系统优化设计
在传统风送式轴流喷雾机的设计中,通过 Fluent 仿真发现其风送系统产生的气流场存在低速区域明显、射流方向风速分布不均匀的问题,这将会导致雾滴发生飘移现象。针对该问题,设计了一种在风筒与环状出风口连接处的弧形出风口结构。在传统轴流风送式喷雾机的风筒与出风口处属于垂直式连接结构,风机产生的气流经过风筒由环形出风口处流出,在流动的过程中,90°的垂直式结构势必会造成气流流动的阻碍,为研究弧形出风口对风送系统的气流影响并找到最佳设计参数,对风送系统进行CFD仿真模拟。
通过CFD数值模拟与试验验证,优化后的风送系统低速区比例由20.83%降至0.71%,在圆角半径为50 mm时低速区域面积趋于稳定,风速分布更加均匀,雾滴飘移率显著降低。
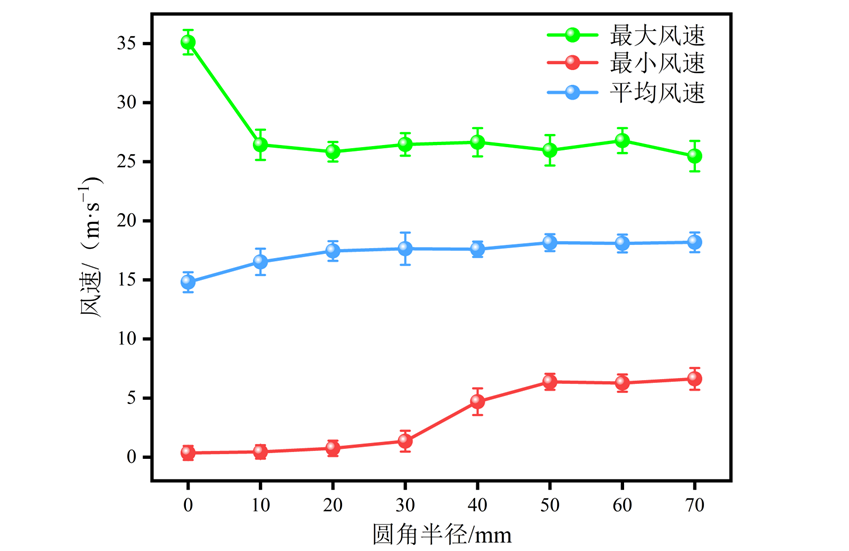
环状出风口处风速变化点线图
在弧形出风口的设计中,增大风筒与环状出风口结合处的圆角半径可以减小流体的转向角,使得气流在拐角处的流动更为流畅,从而减小了能量损失与湍流产生,增大了出风口的平均风速,提升风速在出风口处分布的均匀性。
基于仿真模型的可靠度与可信度,对外部气流场分析时,选择优化后半径 50 mm弧形出风口的风送系统与无弧形出风口的风送系统分别作实地测量。调整风送系统的风机运转,使其保持较低转速运行,增加数据的稳定性。对外部气流场中五个测量标架上的各点进行数据记录,每个标架Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ纵向标线上的五个测量点求平均值,得到距轨道不同距离的纵向标线上的平均风速。优化前后试验结果如下图所示。
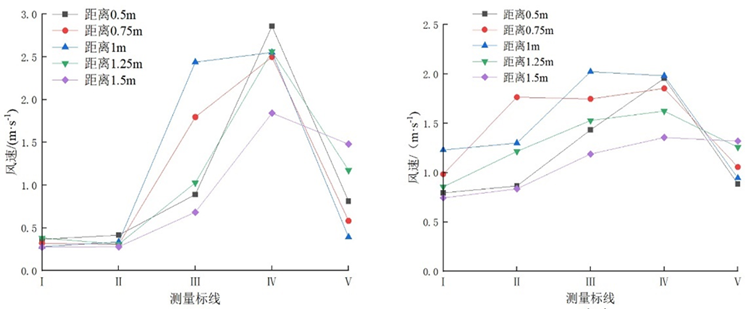
风速变化曲线图
从图中显示,对于无弧形出风口的风送系统,在距离轨道不同距离的空间气流场分布规律基本一致,平均风速呈“左低右高”型,气流场整体向右偏移。受风筒与出风口处直角拐弯结构的影响,Ⅰ、Ⅱ纵线处速度最低,风速相近。到Ⅲ、Ⅳ纵线处时,风速逐渐增长至最大,Ⅴ纵线处位置到达气流扩散的边界处,风速降低。优化后风送系统产生的射流在空间中基本呈“中间高两侧低”的对称分布,气流对中性好。空间气流场中最高风速相比优化前降低,Ⅰ、Ⅱ纵线处风速增加,空间中整体平均风速上升。对比前后说明弧形出风口结构的优化减少了空间气流场中存在的低速区域,并改善了气流向右偏移的现象。结合上述试验结果,这是由于环状出风口处风速的改善引起的,环状出风口处平均风速增加,风速均匀性提高,从而引起了空间气流场中平均风速的增加,提升了风速分布的均匀。
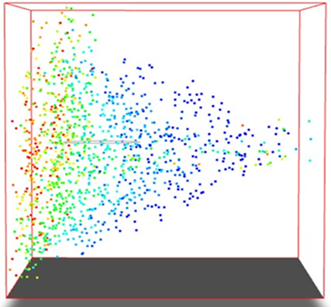
将数据导入Origin整合得到结构优化前后雾滴分布如下图所示。从图中可以看出,结构优化前,雾滴的峰值分布主要集中在第 22个量筒左右,集雾槽右侧的雾滴量高于左侧。弧形出风口的优化使雾滴的峰值向左偏移,集中在第16个量筒左右,并且右侧的雾滴量较优化前明显减少。代入数据得结构优化后雾滴飘移率、质量中心距分别为16.5%、246 mm,较优化前分别降低了31.5%、16.3%,此数据与相关试验研究数据可以得出有效的试验结果。结果表明弧形出风口的结构优化降低了雾滴向一侧的飘移现象,能够有效限定雾滴沉积范围,降低了雾滴飘移率。
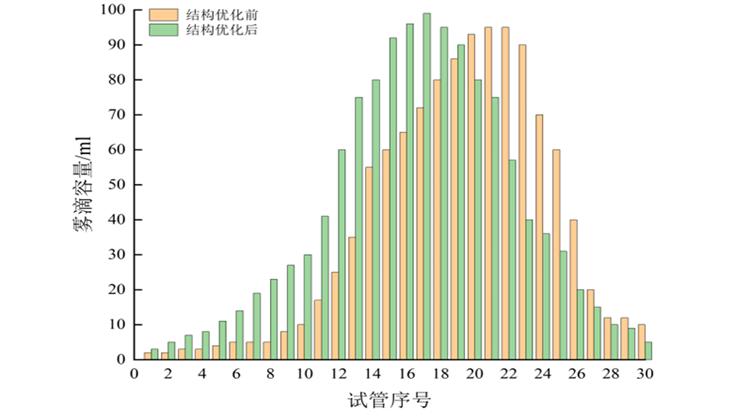
结构优化前后雾滴分布图
2.摇摆喷雾结构设计
风送式喷雾机的风送系统会产生强大的气流,由于果树冠层存在一定的“叶壁效应”和“湍流效应”,这种效应会阻挡风和液滴进入果树内部,致使树冠内部和叶片背部雾滴覆盖率较低,农药浪费严重。
针对丘陵果园轴流风送式喷雾机,改变其传统固定式喷雾喷头装置,设计一种摇摆喷雾结构进行优化。以曲柄摇杆机构作为摇摆喷雾结构的核心,利用电机动力驱动曲柄,曲柄通过连杆连接摇杆,曲柄的旋转带动摇杆的摆动。摇杆通过连轴与联轴器相连,连轴利用轴承座固定在喷雾机上,联轴器上固定有连接喷雾空心弯管的支杆,摇杆的摆动带动联轴器的摆动,从而实现每侧喷雾喷头上下摆动。摇摆喷雾结构包含6个可调节角度的机械开关式喷头,根据不同果园果树高度,合理调节喷头角度,控制喷雾范围。对喷头进行摇摆结构设计,可增大果树上下喷雾范围,使雾滴以不同角度的初速度方向冲击果树叶片,增加果树冠层特别是叶片背面的雾滴覆盖率。摇摆喷雾结构和曲柄摇杆结构如下图所示。
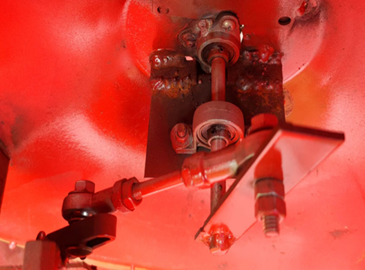
摇摆喷雾结构 曲柄摇杆结构
利用远程遥控发射器发射启动指令信号,喷雾机控制箱中的信号接收器收到信号对 PLC 输入指令,PLC接到信号后做出反应使中间继电器的常开开关闭合,此时电路通电,电机开始运行,曲柄摇杆机构摆动带动喷头进行摇摆喷雾。在摇摆喷雾的过程中,根据果树实际种植情况,利用电机调速器调整电机转速,进而控制喷雾的摇摆速度。摇摆喷雾的工作流程图如下图所示。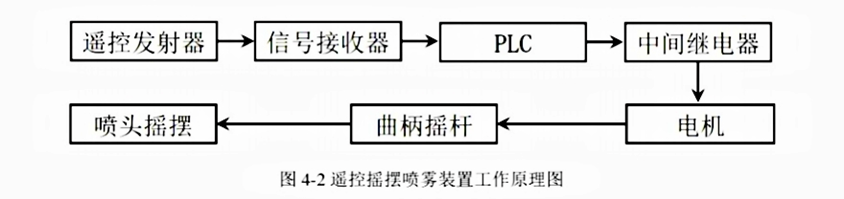
在 Fluent 的条件设定中,通过设定椭圆形捕捉域正反面的壁面特性,来追踪粒子数量的个数。将椭圆形捕捉域的上表面与下表面设为 trap,进行仿真模拟结束后,打开对应的粒子文件进行雾滴粒子数量的统计。仿真试验进行静止喷雾与摇摆喷雾的对比,以验证摇摆喷雾的效果,摇摆喷雾速度设定为40 º/s,其他初始条件和边界条件保持不变,每组试验进行三次,取平均值作为最终试验结果。
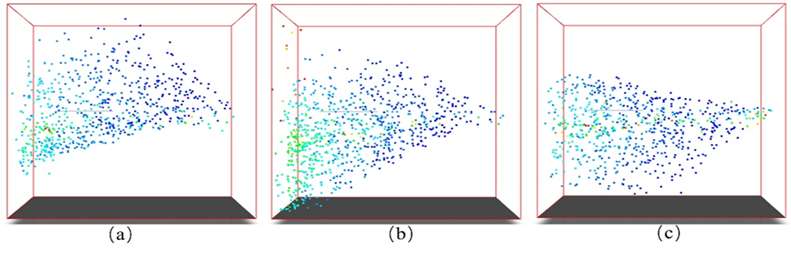
摇摆喷雾不同时刻的仿真过程如下图所示。图 a是喷头由下向上喷射的过程,从图中可以看到椭圆形捕捉域在与地面水平的状态下,多数雾滴以一定的初始速度冲击叶片的背面,而椭圆形捕捉域正面由于雾滴的重力,也可以捕捉到部分雾滴粒子。
图 b 是喷头水平喷射的过程,在这个过程中,大部分雾滴粒子由于自身重力作用落于椭圆形捕捉域的正面,在气流的携带下,椭圆形捕捉域的背面也有部分粒子落下。值得注意的是,这个过程要区分由上到下还是由下到上,在由下到上的过程中,此刻虽然是水平喷射,但是雾滴由于惯性会带有向上的初始速度,这会导致椭圆形捕捉域 的背面雾滴增加。在由上到下的过程中,雾滴带有向下的初速度,这种状态也会导致也椭圆形捕捉域的正面雾滴覆盖率增加。图 c 是喷头由上向下喷射的过程,这个过程相比图b,会有更多的粒子冲击椭圆形捕捉域的正面,增加其表面的雾滴覆盖率,但椭圆形捕捉域背面由于雾滴初始速度方向的问题,这个过程背面捕捉到的粒子较少。
(a)由下到上(b)水平喷射(c)由上到下
静止喷雾不同时刻的仿真过程如下图所示。从图中可以看出,这个过程是喷头水平喷射的过程,雾滴以水平初速度冲击椭圆形捕捉域,由于自身重力的影响,椭圆形捕捉域正面落下的雾滴粒子要高于背面,它与摇摆喷雾的水平喷雾有所不同,雾滴没有向上或者向下的初始速度。
静止喷雾的仿真过程
从结果中得到,当椭圆形捕捉域处于水平的状态下,不管是静止喷雾还是摇摆喷雾,其正面的的雾滴沉积个数远远高于反面,这也反映出在实际植保作业中果树冠层雾滴沉积量存在的问题。相比静止喷雾,摇摆喷雾在椭圆形捕捉域的正面的雾滴沉积个数并没有明显变化,而反面的雾滴沉积个数从24个增加到31个,相比提升了29.2%。结果说明,摇摆喷雾的优化可增加叶片背面的雾滴沉积量,提升喷雾效果。


















