针对普通摄像机在日常测量与识别场景中存在识别模糊、难以清晰捕捉目标物轮廓、无距离测量能力及缺乏指向性识别与测距的优化能力,经调研,认为其核心难点为弱光环境下双目视觉成像模糊、测距精度不足及识别效率低。因此,本项目结合猫头鹰独特弱光高敏感度视觉能力与双目微调视角测距能力,设计以MIPI-ISP双目摄像头、国产K230双核RISC-V处理器为核心,搭载基于STM32F103C8T6的“采样→放大→滤波”三级电流监测电路,融合张正友标定法与OpenCV算法的CanMV视觉处理模块的软硬件一体化设备。
具体实现为摄像头模拟猫头鹰弱光视觉能力优化硬件级低光成像、物距标定与数字变焦补偿,从而提升图像采集端弱光成像清晰度;CanMV模块依托硬件级几何校正功能修正成像畸变,结合OpenCV算法提取目标轮廓后,按双目视觉测量原理计算距离,模拟猫头鹰双目微调视角逻辑;电流监测电路通过串联精密采样电阻、放大器及滤波电容构建采集链路,同步获取供电数据。MIPI-ISP双目摄像头采集目标图像,体现弱光下清晰捕捉目标特征的能力;K230处理器处理采集目标,体现弱光下清晰捕捉目标特征的能力;CanMV模块基于图像数据提取目标轮廓并计算距离,体现精准识别与测距能力,各部件协同工作可大幅提高测量效率,相较于普通摄像机与传统摄像机该装置无需额外搭配测距设备即可实现“识别+测距”一体化功能。
本项目旨在研发一种用于复杂弱光场景下高精度测距的双目视觉识别装置,实现弱光环境下目标物精准识别、距离与尺寸测量及实时显示测量结果与功耗数据的功能,使其在弱光环境下仍能保持高精度测量且操作简单无需复杂调试,降低硬件采购成本与多设备协同的复杂度,使装置一体化、智能化。满足生活中夜间家居尺寸测量、户外夜间物体定位及工作中工业夜间设备巡检测距、仓储夜间货物尺寸核验、应急救援夜间目标距离判断等场景的高效测量需求。
该软件通过控制各硬件模块协同工作,将目标物距离、尺寸、类型及系统功耗数据传输至液晶显示屏实时展现,帮助用户直观获取测量核心信息。可实时显示目标物类型、距离、尺寸及实时功耗与最大功耗,让用户更好地掌握测量精度与系统能耗状态。软件中CanMV模块具备硬件级倾斜物面快速校正功能,兼容传统视觉函数与MicroPython语法,帮助用户清晰了解系统从一键启动、初始化、图像采集到低功耗模式的完整工作流程,从而更便捷地操作装置,更清晰地判断测量流程是否正常。其中OpenCV算法的边缘检测与轮廓提取优化结合CanMV模块的硬件级加速,提高了目标识别准确率与测量响应速度,减少用户在倾斜目标物等复杂场景下测量误差大、等待时间长的问题。主控空闲时进入STOP模式的低功耗策略,降低系统空闲能耗减少与用户对能耗过高的担忧。这一系统程序逻辑清晰流程完整,具备快速响应、低功耗运行及高识别精度的性能,大大提高了高效测量的准确性且操作简便,如图1单片机与串口屏的连线电路图。
图1.单片机与串口屏的连线电路图
硬件设计:①MIPI-ISP摄像头:通过硬件级低光成像优化搭配物距标定与数字变焦补偿实现图像采集,能提升弱光环境下成像清晰度解决固定焦距模糊问题,为后续数据处理提供优质图像输入。②国产K230双核RISC-V处理器:作为主控芯片集成ADC/LCD控制器,承担图像数据与电流数据的处理任务,以低功耗高算力保障系统快速响应,为各模块协同工作提供运算支撑。③电流测量电路:基于串联精密采样电阻、INA240放大器及滤波电容的“采样→放大→滤波”架构监测供电电流,可精准获取电流数据为系统功耗计算提供可靠依据,确保功耗监测精度。
④6-8英寸液晶显示屏:通过GPIO/SPI接口连接主控芯片,用于显示测量结果与功耗数据,能让用户实时直观获取目标物信息与系统能耗状态,简化数据查看流程。⑤按键:GPIO接口与主控连接实现测量启动与二次采集触发,可实现便捷人机交互,帮助用户快速控制测量流程无需复杂操作。⑥5V直流稳压电源:全系统硬件模块供电,能提供稳定电压输出,保障各部件稳定运行避免电压波动影响测量精度。装置整体通过接口连接MIPI-ISP摄像头、电流测量电路、按键及液晶显示屏,由5V直流稳压电源统一供电,形成“图像采集-数据处理-电流监测-人机交互-结果显示”的完整硬件架构,通过标物的距离与尺寸测量,同时实时监测并显示系统功耗,如图2硬件框图。
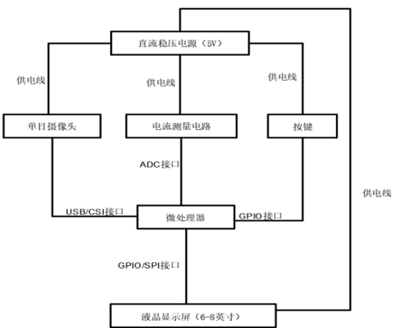
图2.硬件框图
软件设计:本系统软件设计采用MicroPython与C语言结合的开发模式,基于CanMV平台与OpenCV库构建软件架构,针对硬件模块设计控制逻辑。其中,MicroPython凭借简洁语法与硬件兼容性支撑CanMV视觉处理模块的快速开发调试,可高效调用模块内硬件加速单元,C语言负责K230主控芯片及外围硬件的底层驱动开发,包括MIPI-ISP摄像头数据采集接口、STM32F103C8T6芯片ADC电流采样通道、液晶显示屏GPIO/SPI通信协议等,保障硬件控制与数据传输的稳定性。软件架构以CanMV平台与OpenCV库为核心,CanMV平台集成针对K230芯片优化的图像预处理加速器,可快速完成图像畸变校正、透视变换等操作,其内置MicroPython视觉库兼容传统视觉函数,直接对接硬件功能需求。OpenCV库提供高阶图像处理能力,用于目标特征精准提取,二者通过数据接口无缝衔接,形成“硬件加速预处理+软件算法精处理”的协同架构,兼顾效率与精度。软件控制逻辑采用模块化设计,摄像头控制模块通过C语言驱动程序配置参数,结合12-18cm物距标定与数字变焦补偿修正固定焦距偏差,将彩色图像数据按帧缓存至K230处理器片上RAM;图像预处理模块调用OpenCV的cvtColor函数将彩色图像转灰度图,经边缘检测算法提取目标轮廓,阈值通过测试标定以精准区分目标与背景。目标识别模块由CanMV平台执行轮廓检测与多边形逼近,根据角点数量判断目标类型,并利用硬件级倾斜物面校正单元对30°-60°倾斜正方形执行透视变换以获取准确轮廓;距离与尺寸计算模块基于双目视觉测量原理,调用通过张正友标定法获取的相机内参矩阵与畸变系数校正像素坐标,结合A4纸基准尺寸、相机焦距及数字变焦补偿系数计算实际距离与尺寸,确保距离误差≤±5cm、尺寸误差≤±1cm;电流与功耗处理模块通过C语言编写的ADC采样程序采集电压信号,换算为实时电流后结合5V电源电压计算实时功耗与最大功耗,传输至显示屏同步显示。软件流程遵循设计逻辑,一键启动后完成各模块初始化,依次执行图像采集、预处理、识别、计算及功耗监测并显示结果。假如5秒内检测到按键触发则二次测量,否则K230主控芯片进入STOP低功耗模式,关闭摄像头与显示屏背光以降低能耗,如图3软件流程图。
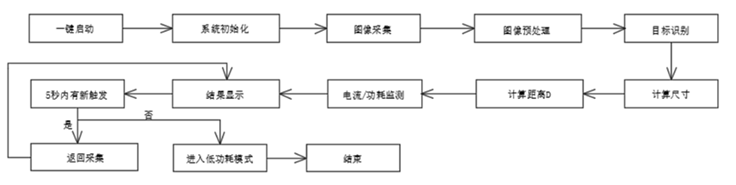
图3.软件流程图
创新点:
1. 硬件直连仿生测距:通过猫头鹰的双目视觉主导与低能耗下快速精准锁定目标距离的特性,利用K230双核RISC-V处理器与MIPI-ISP摄像头的硬件直连设计,进行图像数据处理、距离与尺寸计算、各硬件模块协同控制与方案对比分析,实现作业对算力、功耗及响应速度的设计要求;
2. CanMV倾斜仿生识别;通过猫头鹰头部微小转动修正视角偏差与优先捕捉猎物轮廓以提升识别效率的能力,在CanMV模块基于K230芯片的硬件级优化,结合 OpenCV算法实现目标轮廓提取与倾斜校正,可精准处理30°-60°倾斜状态下的正方形目标物测量,提高了倾斜场景下目标识别准确率与测量精度;
3. 软硬协同低功耗:通过借助猫头鹰在非捕猎状态下低代谢待机、发现猎物后可以瞬间响应这一性能,打破传统测量装置空闲时功耗不稳定、续航能力差的局限,同时不影响测量响应速度,根据硬件与软件的协同优化,改善传统装置空闲时功耗过高的局限;
4. 集成监测三位一体:通过集成电流测量电路,将目标物测距、尺寸测量与系统功耗监测整合为一体,无需像传统装置那样额外搭配多台设备,大幅简化操作流程,并且该电流测量电路以三级架构精准采集电流数据,经K230处理器联动换算功耗后,与测距、尺寸数据同步显示,既避免人工整合数据的误差,又提升使用便捷性。
可行性:
根据部件作用进行分析:
本装置基于部件功能适配与硬件软件协同设计,采用K230双核RISC-V处理器作为主控承担图像数据处理、距离尺寸计算及各模块协同控制任务且经方案对比确认其低功耗高算力特性可满足响应速度与能耗要求,搭配MIPI-ISP摄像头并通过物距标定与数字变焦补偿解决固定焦距模糊问题为后续数据处理提供清晰图像,依托CanMV视觉处理模块的硬件级倾斜校正能力及与OpenCV算法的适配性高效处理倾斜目标识别需求,基于STM32F103C8T6构建的电流测量电路采用采样、放大、滤波三级架构精准采集电流数据再经ADC接口传输至K230完成功耗换算,各部件在硬件架构上实现接口兼容无冲突且软件流程衔接顺畅,整体通过部件间的功能互补与软硬件协同保障了100-200cm范围内目标物测量及实时功耗检测设计要求的实现。
并且装置选型均基于方案对比筛选且各部件功能与设计需求高度适配,MIPI-ISP摄像头的焦距优化措施确保图像输入质量为后续计算提供可靠基础,CanMV视觉处理模块的硬件级校正能力直接适配倾斜目标识别场景,电流测量电路的三级架构保障功耗数据精准性。
软件层面从系统启动初始化到图像采集、预处理、目标识别、参数计算再到功耗监测及低功耗模式切换形成完整且顺畅的流程,软硬件间的协同配合既发挥了 K230处理器的统筹控制与数据处理能力又依托各专用模块的功能优势,使得整体系统在满足测量精度与响应速度的同时实现低功耗运行,充分验证了该部件组合与协同设计方式的可行性,如图4完整接线图和图5电流采样图。
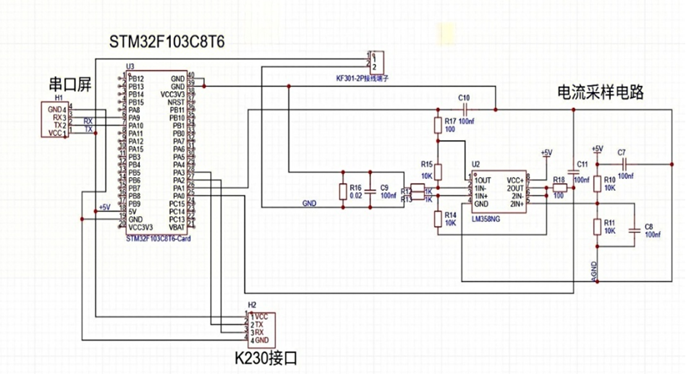
图4.完整接线图
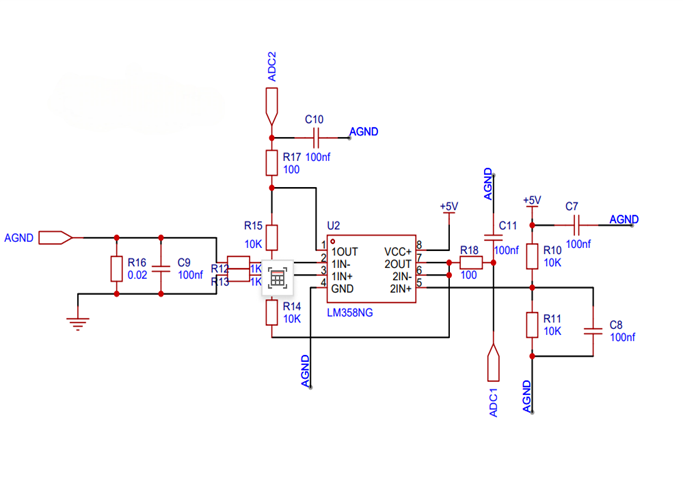
图5.电流采样电路










