多规格毛巾高效折叠定型与封装一体化装置
一、一、项目简介
本项目基于机械自动化与智能控制理论,采用三维建模与拟分析结合的方法,针对毛巾包装行业传统人工操作效率低、质量参差不齐、成本高昂及市场缺乏全流程一体化自动化设备的问题,打造多规格毛巾高效折叠定型与封装一体化装置,并且运用FDM增材制造技术进行了实体验证。

装置集加湿、折叠、装袋功能于一体。加湿系统采用超声波雾化喷头,实现均匀喷洒,为后续折叠定型创造良好条件;折叠系统结合大扭矩舵机与折刀机构,支持200–400mm多规格毛巾精准高速折叠;封装系统通过传送带、光电定位与PID热封,实现≤±2mm封切精度及自动裁剪,传送带联动系统保障各工序无缝衔接。
本装置可完成毛巾加湿、折叠、封装全流程自动化作业,打破传统设备功能割裂问题,支持多规格自适应,通过各环节精准控制提升产品合格率,同时集成智能监控预警,降低人力与能耗成本,广泛适用于酒店、民宿、餐厅、景区及家用毛巾的打包封装。
本装置为行业赋能显著,能提升25%生产效率、降低40%人工成本,提高企业单位时间内的产量,降低综合成本,减少人工投入,推动行业智能化发展。
二、项目演示视频
三、设计开发
3.1整机设计
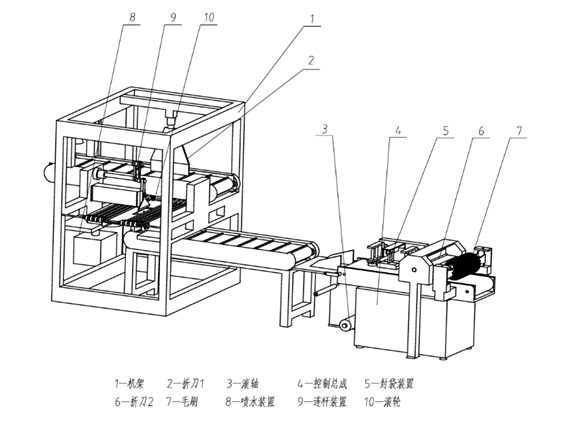
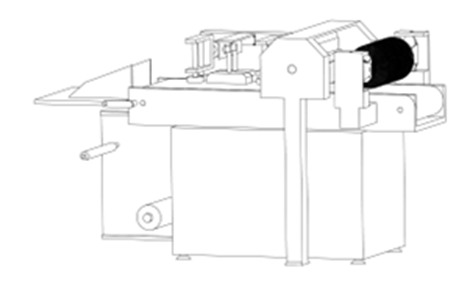
本装置的整机设计秉承 “模块集成、流线布局、智能驱动” 的核心理念,旨在构建一个高效、稳定且易于维护的一体化智能制造单元。整机采用刚性金属机架作为统一的结构平台,将加湿、折叠、封装三大核心功能模块以“乐高式”理念进行精准集成。整体布局经过严格的运动学和人机工程学仿真优化,形成了 “一”字型单向流的物料传输路径。毛巾从进料端开始,依次经历加湿、一次横向折叠、二次纵向折叠、姿态校正、精准落袋、热封裁切,最终成品输出。整个流程路径最短,无交叉、无回流,最大限度地减少了不必要的物料移动和时间浪费,为实现8.3秒/条的高生产节拍奠定了物理基础。构建了以可编程逻辑控制器(PLC)为决策核心,以伺服驱动器、温控器、传感器为执行与感知末端的先进控制架构。PLC作为“大脑”,统一处理所有传感器的输入信号,并向下游所有执行机构发出同步指令。这种架构既保证了三大功能模块在时序上的高度协同,实现了“一拍即合”的精准动作,又使得各模块具备一定的独立性,便于故障的快速诊断与模块化维护。整机设计充分考虑了可维护性:关键易损件(如雾化喷头、封切刀片)采用快换结构,整体装置三维模型如图2所示。
3.2加湿装置
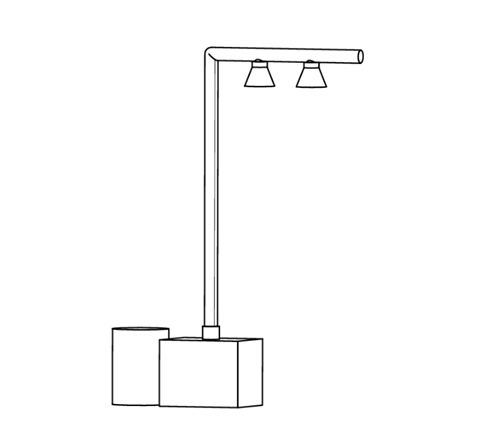
本装置是毛巾折叠定型的前道关键工序,其设计超越了简单的“喷水”概念,实现了对毛巾湿度的精准、均匀、可控调节。采用核心振荡频率为1.7MHz的超声波雾化片,将水分子高效破碎为5-10微米的极细雾滴。创新性地采用多点位、小角度的喷头矩阵布局,而非单点或双点喷洒。确保毛巾在通过加湿区时,其横截面上的任一点都能获得几乎等量的水分。集成高精度数字湿度传感器,实时监测已加湿毛巾的湿度反馈。该系统与主控PLC构成闭环控制。内置300W功率的PTC加热棒,可将5L储水箱内的水温稳定维持在55-60℃的舒适区间。加湿装置三维模型如所示。
3.3折叠装置
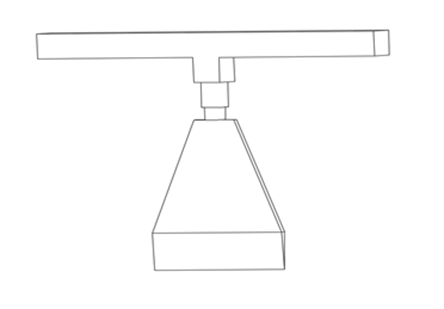
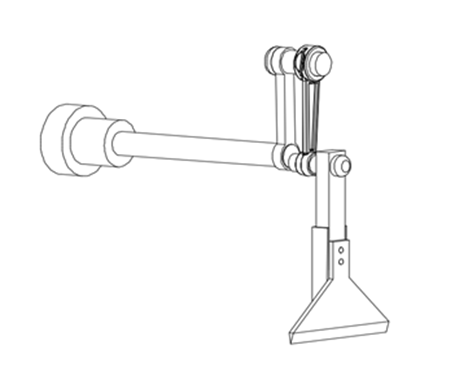
折叠装置是本项目的机械核心,其设计融合了高刚性驱动与柔性自适应控制,以应对毛巾的柔软特性和多规格变化。采用 “液压缸 + 直流无刷电机”的混合驱动方案。液压缸提供短时、巨大的下压力,确保即使是最厚实的毛巾也能被瞬间压平折叠,克服其内部弹性;直流无刷电机则负责折刀在接近毛巾时的低速精密伺服控制,实现“轻触式”的精准定位,避免对毛巾表面造成冲击或损伤。基于平面四杆机构原理,经过运动学优化设计,使折刀的执行端能走出一个理想的“抬起-前进-下压-退回”运动轨迹。该轨迹保证了折叠动作高效、平稳且冲击小。动力伺服电机通过同步带轮系统传递至连杆主动杆。伺服电机的高响应性确保了折刀动作与传送带节拍的严格同步,整个过程全自动完成,无需人工干预机械结构。横向折叠部分三维模型如图所示:
纵向折叠部分三维模型如图所示:
根据纵向折叠部分实际运动以及运动仿真画出了机构运动简图,如图所示:
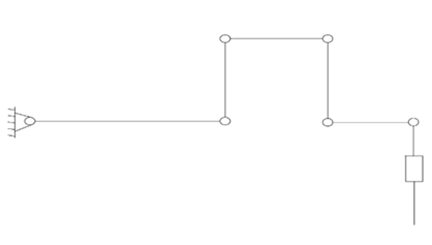
根据图5计算纵向折叠部分自由度:
由图可得:

则此机构自由度为:
3.4封装装置
封装系统是成品品质的最终保障,集成了光、机、电、气动和视觉技术,实现了高速度下的高精度作业。在落袋工位上方部署双目工业相机,实时采集已折叠毛巾的图像。图像数据传输至工控机,运行基于CNN与HRNet的深度学习算法。该算法能精准识别毛巾的角点、边缘轮廓,并计算出其相对于包装袋入口的中心位置偏差和角度偏转。在毛巾下落过程中对其进行微调,或调整机械臂姿态,确保毛巾以完美的姿态进入包装袋。由精密调压阀和气缸组成压力施压机构。压力可在5-15N范围内无级调节,以适应不同材质包装袋的封口压力需求,确保封口线平整、牢固,强度可达15N/15mm以上。封口完成后,集成在同一模组上的伺服驱动切刀立即动作,按预设长度进行裁切。使成品长度统一,外观精美。封装系统如图所示:
姿态变化

式中: 为线性插值, 为固定偏移, 为可学习的姿态补偿偏移
突出毛巾姿态关键区域:
式中: 为姿态代价体的细粒度向量
为姿态代价体的细粒度向量
用平均池化提取区域特征:
式中:  为区域量子向量
为区域量子向量
四、装置可行性
4.1.项目研究的技术基础
1.电机
本装置动力部分拟采用交流伺服电机,交流伺服电机也是无刷电机,分为同步 和异步电机,运动控制中一般都用同步电机,它的功率范围大,大惯量,最高转动 速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。根据本装 置所需功率范围,最后采用“AKD-P00606-NBEC-0000”型号的电机。
2.舵机
①LDX-218 是一款双轴数字舵机,具备高精度、双自由度控制和数字信号响应, 适用于需要多角度调节或复杂运动控制 的场景。
②LW-20MG大扭力金属齿全防水攀爬车机械臂机器人数码舵机:LW-20MG 凭 借其高强度、防水性和精准控制,特别适合需要动力、耐久性及环境适应性的场景。
③SG5010 38 克 大扭力舵机:SG5010 适合预算有限、需要轻量化和中等扭矩 的 场景,如RC模型、教育机器人、小型自动化项目。
考虑到装置控制类别、适用范围及成本等问题,经对比选型决定采用SG5010 38 克大扭力舵机以适应装置不同角度的旋转需求。
4.2关键部件强度校核分析
在多规格毛巾高效折叠定型与封装一体化装置的设计过程中,其连杆、折刀、机架是主要受力部件,因此需要对其进行校核分析。通过simulation分析得出,设计部件均满足设计要求。如图所示。
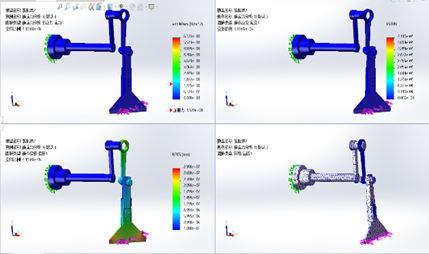
连杆应力分析
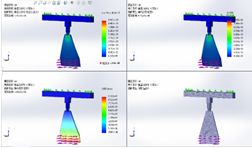
切刀应力分析
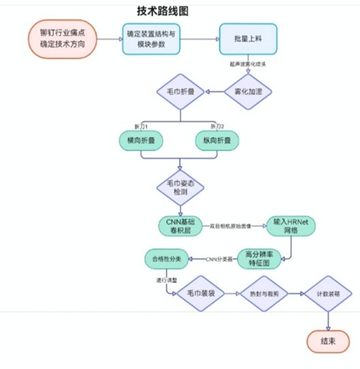
4.3技术路线
本项目的技术研发遵循“理论奠基、仿真驱动、迭代优化”的严谨流程,以系统工程的思维贯穿始终。我们制定了从需求分析到样机定型的完整技术实现路径,旨在将创新概念转化为稳定可靠的工业产品,其具体实施流程如图所示:
五、应用场景
本装置潜在应用场景可总结为五大核心领域:首先为酒店与文旅住宿场景,适配文旅消费增长下的毛巾需求激增,解决小作坊产能不足、品质不稳问题,满足连锁酒店标准化供应;其次为餐饮服务场景,灵活适配火锅、中餐店等的小规格擦手巾需求,避免人工污染,降低供应链成本;再者为公共服务与交通枢纽场景,契合机场贵宾厅、医院等对卫生安全、稳定供应的要求,减少交叉感染风险;此外为会展与大型活动场景,应对短期集中、批量大的需求,通过调整节拍快速扩能,提升物资调配效率;最后为中小型日用品企业升级场景,助力传统小作坊向规模化、标准化生产转型,拓展供货渠道,契合集约化政策方向。















