研究目的和意义:
随着社会对无障碍环境的重视和科技的飞速发展,视障群体的生活自主性与安全性需求日益受到关注。智能导盲眼镜作为辅助技术的重要创新,旨在通过智能化手段帮助视障人士感知环境、规避障碍并提升独立行动能力。其研究目的和意义主要体现在以下几个方面:
1、提升出行安全与自主性
智能导盲眼镜利用计算机视觉、超声波传感器和实时导航技术,可精准识别道路障碍物、交通信号、台阶落差等潜在危险,并通过语音或振动反馈提醒用户。这一功能显著降低了视障人士出行时的碰撞风险,使其能够更安全、自信地参与户外活动,从而增强生活独立性和社会融入感。
2、弥补传统助盲工具的局限性
传统导盲杖探测范围有限,导盲犬则存在训练成本高、覆盖人群少等问题。智能导盲眼镜通过多模态环境感知(如识别文字、人脸、红绿灯等),提供更全面的信息交互支持。其轻量化设计与全天候使用特性,可有效减少用户对单一工具的依赖,拓展视障群体的活动场景。
3、推动多领域技术融合与创新
研发智能导盲眼镜需要突破高精度定位、低延迟图像处理、自适应AI算法等关键技术,这将推动计算机视觉、边缘计算、柔性电子等领域的交叉创新。相关技术的溢出效应还可应用于增强现实(AR)、智能安防等领域,促进产业链协同发展。
4、促进社会包容与平等发展
智能导盲眼镜的普及不仅体现科技的人文关怀,更能缩小视障群体与健全人在教育、就业、社交等方面的资源差距。通过技术赋能,助力视障人士平等参与社会活动,推动构建包容性社会,符合联合国可持续发展目标中“减少不平等”的核心理念。
综上所述,智能导盲眼镜的研究兼具技术创新与社会价值,它不仅能够改善视障群体的生活质量,还为人工智能的普惠化应用提供了实践范本。随着5G、物联网和可穿戴设备的进一步成熟,智能导盲眼镜有望成为视障人士无缝融入数字化社会的关键桥梁。
本项目通过分析视障群体独立出行的安全需求,研发一款基于多模态感知与人工智能融合的智能导盲眼镜,其主要结构包括STM32F103RCT6单片机、激光雷达测距模块、深度摄像头图像采集系统、GPS定位模块和AI语音交互系统,在传感器数据融合算法和避障导航策略上进行创新改进,采用轻量化嵌入式设计,同时可以自适应多种环境场景,具备精准感知、智能决策、实时反馈等特点,可检测障碍物、规划导航路径、识别物体并提供多模态交互提示,该眼镜的设计和研发将显著提升视障人士的出行安全性和自主性。
结构说明:
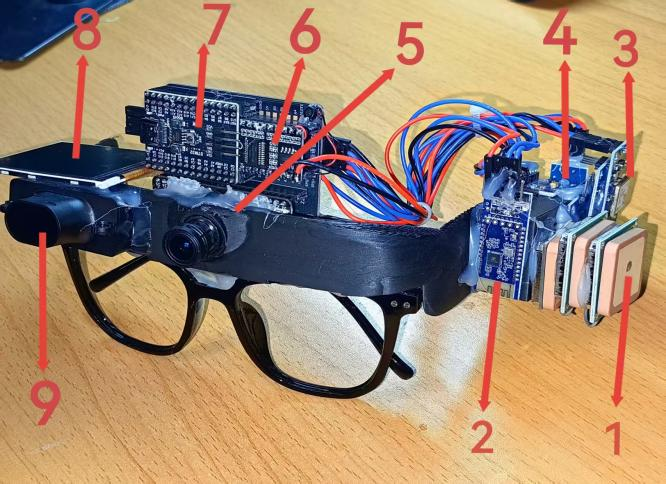
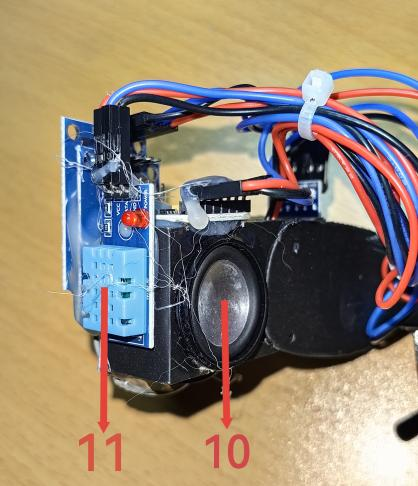
整体结构设计:1.GPS天线 2.蓝牙模块 3.GPS定位 4.陀螺仪模块 5.深度视觉识别模块 6.语言模块 7.STM32最小系统板主控 8.屏幕 9.激光测距模块 10.27MM小喇叭 11.温湿度传感器
功能与使用说明:
智能导盲眼镜是一款高性能的可穿戴智能导航设备,其主要功能是为视障人士在室内外复杂环境中提供实时、精准的出行辅助。该设备采用STM32F103RCT6单片机作为中央处理器,能够实现对激光雷达、深度摄像头、GPS定位模块、陀螺仪等多模态传感器所采集的环境信息进行高效融合与处理。通过将处理后的数据输入至智能避障导航系统,结合K210图像识别模块对障碍物、行人、交通标志等进行实时识别与测距,系统能够动态规划安全路径,并通过AI语音交互模块、震动反馈模块与蜂鸣器实现多级预警提示。智能导盲眼镜具备全天候障碍检测、精准定位导航、摔倒检测报警、夜间主动避让、温湿度语音查询等功能,具有轻便易戴、响应迅速、交互自然、续航持久等特点,该设备的设计与研发将显著提升视障人士的独立出行能力与生活自主性。
设计原理:
本项目是基于多模态感知与人工智能融合的一款智能导盲眼镜,以STM32F103RCT6单片机作为核心控制模块,对多传感器数据采集模块和智能交互模块进行协同控制,以STM32单片机最小系统作为基础,以激光雷达与深度摄像头融合感知代替人工视觉识别,此障碍物检测系统作为核心感知系统,以AI语音交互与多级触觉反馈代替人工导航引导,此智能交互模块作为辅助系统,采用自适应路径规划算法,通过多模态数据融合算法、动态避障导航算法实现视障人士的智能导引与安全出行。
项目的总体设计框图如下所示:
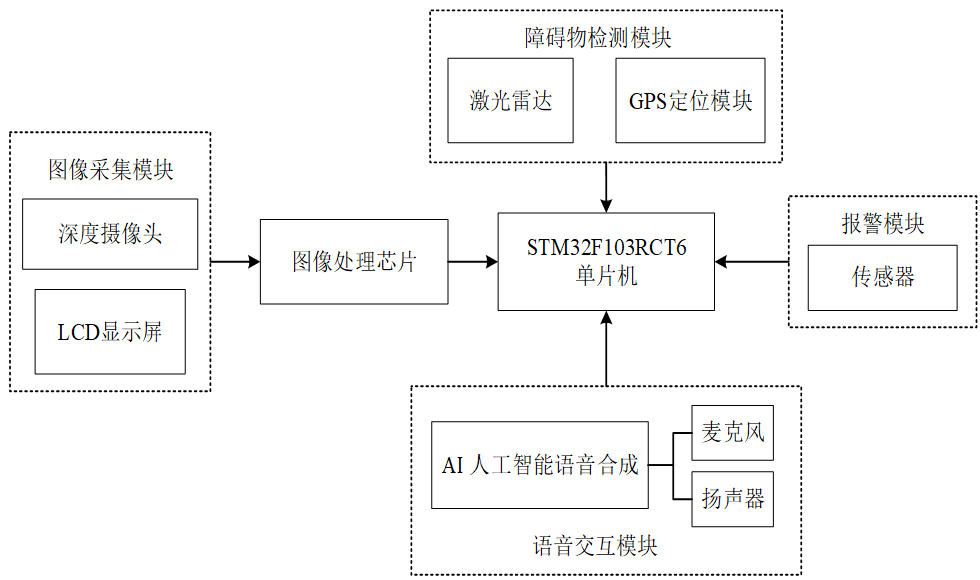
图 1 智能导盲眼镜的总体结构设计框图
设计方案:
硬件与软件技术要求
1、图像采集模块
图像处理芯片k210能够识别多种物体,可通过LCD显示屏框出识别物。
2、激光雷达测距模块
同时上传障碍物距离显示在LCD显示屏。
3、GPS定位模块
可以把GPS坐标经纬度上传手机端,实时同步经纬度。
4、陀螺仪摔倒检测功能
检测摔倒语音交互模块的扬声器会求助,同时GPS实时同步信息上传手机端。
5、温湿度互动功能
语音输入“温度情况”回答当前温度,语音输入“湿度情况”回答当前湿度。
6、震动反馈模块
当障碍物的距离小于2m时,震动模块每秒震动两次,当障碍物距离小于1m时,每秒震动3次。
7、夜间避让功能
可通过语音开关,走夜路可以让路人注意避让,距离大于2m的时候,白光常亮距离小于2m>1m的时候,蓝红交替闪烁两次,距离小于1m蓝红交替闪烁四次。
8、蜂鸣器模块
可通过语音开关,距离大于2m<1m的时候,蜂鸣器一秒钟响200毫秒。距离小于1m>0.5m的时候,蜂鸣器一秒钟响 500毫秒,距离小于0.5m的时候长响。
9、AI人工智能语音控制功能
可用“小智小智”唤醒语音助手,说“增大音量”“减小音量”可以控制音量大小;“打开灯光报警”“关闭灯光报警”可以打开并且关闭灯光;“打开距离播报”“关闭距离播报”可以控制语音距离播报的开关。
10、智能避障导航系统
考虑到视障人士日常时的出行路况的存在多可能性,多变性和障碍物的不确定性。因此对系统的智能避障导航的研究与设计有更加严格的快速反应性和精确度要求。当前方视角检测到存在障碍物和人体时,如何在有限的三维空间对产品用户的行进路线快速反应进行重新规划是本智能避障导航系统设计的核心。借鉴智能手机端APP的导航技术,本设备设计以GPS导航全球定位系统为主体运行,将激光雷达测距模块与图像识别模块所获取的角度内的目标物体深度数据信息相结合。经由过程自研算法优化编量转入智能避障导航系统,从而实现智能避障导航系统与激光测距模块和图像识别模块协同汇总工作,完成对出行线路及时导航的目标。本设备的眼镜腿部安装有卫星信号接收机,用于接收GPS定位系统的信号并确认设备所在点的二维平面地理位置。当设备融合化传感器检测到前方存在障碍物时,由K210图像识别模块所获取障碍物形态信息,结合当前深度摄像头角度内的周边路况信息,通过激光测距模块优化建模后计算出前方障碍物和设备之间的空间两点之间的位移距离,智能导航系统在K210图像识别模块和激光测距模块,对设备检测环境判断与确定的基础之上。对设备使用用户行进的路线进行重新规划并实现实时语音指令辅助用户导航前行,完成设备用户对障碍物的实时语音避障。由于路况的多可能性与随机性,智能避障导航系统将对设备用户周围环境路况信息进行实时位置处理分析,快速响应处理结果进而规划出最佳的出行导航方案。障碍物检测与避障算法框图如图2所示。
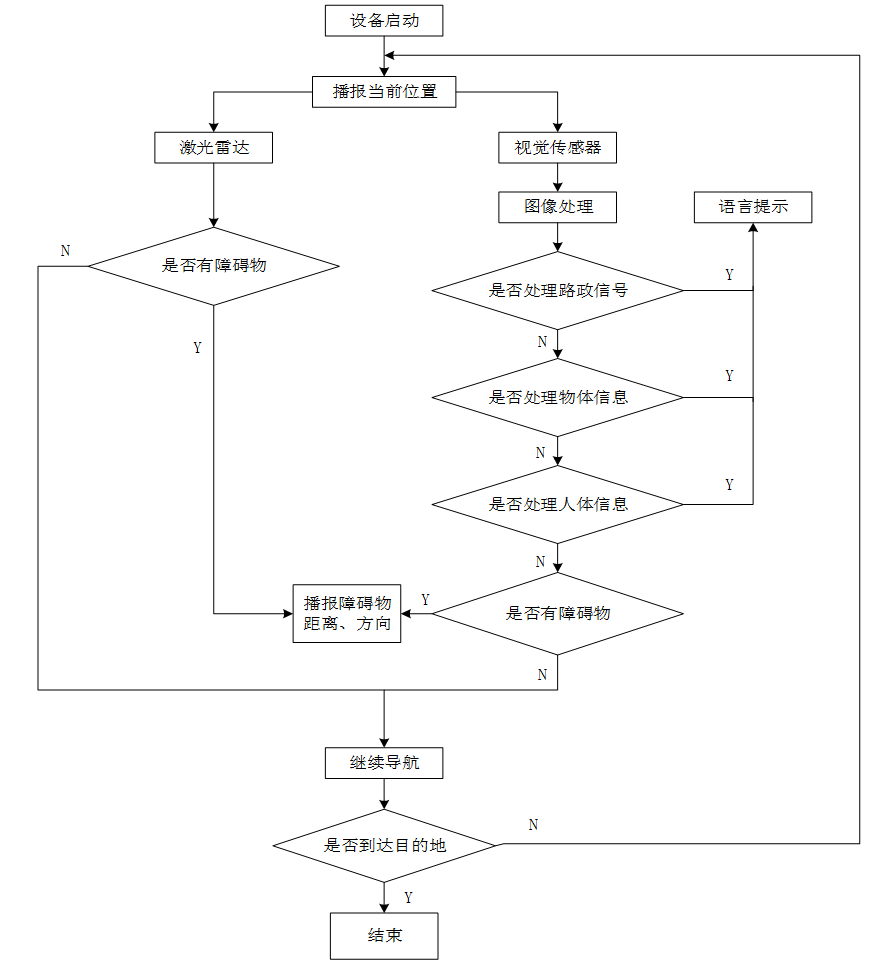
图2 障碍物检测与避障算法框图
综上,该智能导盲眼镜利用K210图像识别模块精准识别多种物体,并通过LCD屏幕框出识别物体,显著提升设备的识别准确性和交互实时性;通过实时上传障碍物距离信息至LCD显示屏,帮助用户判断前方障碍物的安全距离,实现动态预警和自主避障;能够将用户的位置经纬度同步至手机,方便监护人实时监控位置,完成远程定位追踪功能;通过向设备语音指令询问环境参数时,设备可语音回答温湿度数据,增强设备的交互便捷性和信息直观性;摔倒检测功能和夜间避让功能主动规避风险并提升低光适应性,进一步保障用户安全;震动反馈模块根据障碍物距离提供梯度强度震动,强化用户的空间感知能力;蜂鸣器模块通过频率分级提示距离远近,构建多模态警示系统;AI语音控制采用定制唤醒词启动助手,支持用户便捷调节音量、灯光及距离播报,优化人机协同效率;智能避障导航系统深度融合激光测距与图像识别数据,实时规划最优路径并通过语音指令引导用户安全绕障,形成自适应导航闭环。多模块协同工作,预期达成精准感知、智能决策、多维反馈的全场景无障碍通行功能,为视障群体提供安全、自主、高效的出行解决方案。
产品创新性:
(1)多模态感知融合系统:创新性地融合激光雷达、深度摄像头、GPS与陀螺仪等多种传感器,结合动态权重分配算法,提升复杂天气与环境下的感知鲁棒性。
(2)分层交互与多级预警机制:采用三级反馈方式,根据障碍物距离动态调整提示强度,兼顾反应速度与用户体验。
(3)场景自适应功能:具备夜间避让模式与摔倒检测联动报警功能,夜间通过LED灯光提示行人避让,摔倒时自动触发语音求助并同步位置信息。
(4)智能避障导航算法:基于激光测距与K210图像识别数据,实时规划最优路径,实现动态避障与语音引导,形成闭环导航系统。









