磐石灵枢机器人
一、作品内容简介
在智能制造与工业4.0的浪潮下,传统机械臂的高精度控制依赖复杂的伺服系统和刚性结构设计,但这类设计往往导致运动惯量大、能耗高,难以满足高速生产需求,为追求效率而过度简化工艺流程的做法,往往导致精度损失和维护成本上升,即传统机械臂型机器人面临“精度-柔性-效率”难以协同的问题。
本作品针对上述难题,研发了一款集异构数据融合、冗余驱动控制、精准稳定运动于一体的面向多领域的创新机器人,致力于成为“全能机械手”。
“磐石灵枢”机器人系统由高刚度混联式机械臂和麦克纳姆轮全向移动底盘两大核心模块组成。机械臂采用六连杆复合驱动混联机构,通过中部冗余连杆设计提升了刚性和运动稳定性,避免了传统并联机构的奇异位形问题,实现了全域高精度连续运动。滚珠丝杠精密传动单元进一步保障了末端执行器的定位精度和负载能力。底盘采用四轮独立伺服驱动的麦克纳姆轮系统,使机器人具备平面内任意方向平移和零转弯半径旋转的能力,将操作范围从固定基座扩展到整个车间。该系统搭载多源异构传感器融合系统和智能控制系统,赋予机器人强大的环境感知、动态避障和自主路径规划能力。电动气动混合驱动策略可根据不同作业场景动态匹配动力,在保证高精度与稳定性的同时兼顾操作的柔顺性与适应性。
该机器人具有广泛的应用前景。在工业制造领域,其高刚度和高精度特性适用于精密装配、零部件搬运等场景,可显著提升生产效率。物流仓储领域可利用其全向移动和柔性抓取能力,在狭窄空间高效完成货物分拣与搬运。医疗辅助领域则能发挥其高精度操作优势,应用于实验室自动化等场景。此外,模块化设计使其在特殊环境作业中展现出灵活稳定的性能。
总体而言,“磐石灵枢——高刚度混联式全域柔性作业机器人”通过刚柔并济的结构创新、全域覆盖的运动能力、智能协同的感知控制,实现了高精度、高稳定性、大负载与强适应性的统一。它不仅具有显著的技术创新性,更着眼于为解决实际工业痛点提出可行方案,提供了一种高性能、高性价比的国产化解决方案,展现出重要的实用价值和广阔的市场潜力。
二、研制背景及意义
(一)研制背景
机器人技术已深度融入现代生产生活的众多领域,成为协助人类工作、提升生产效率不可或缺的关键工具。尤其在高端制造、精密物流、现代医疗等领域,对先进机器人装备的需求日益迫切且要求不断提升。这些领域普遍对机器人的工作性能提出了极为严苛的标准,例如在精密制造中需要极高的重复定位精度与长期运行稳定性以保证产品质量;在微创手术等高端医疗场景中,要求机器人具备亚毫米级的操作精度和无抖动的平稳性;在高速运转的工业物流分拣与搬运环节,则依赖机器人系统在大负载、快节奏下的高可靠性与动态精度。满足此类高稳定、高精度的性能需求,已成为衡量机器人装备先进性的核心指标。智能化的机器人装备不仅是国家制造业实力与科技水平的重要体现,更是推动人类社会迈向第四次工业革命的核心引擎。作为机器人学研究的重要分支,混联机构凭借其融合串联与并联结构优势的特性,展现出高速、高精度、高刚度、高承载能力等一系列卓越性能,持续成为机器人学科的研究热点与焦点。
(二)国内外研究现状
|
|
|
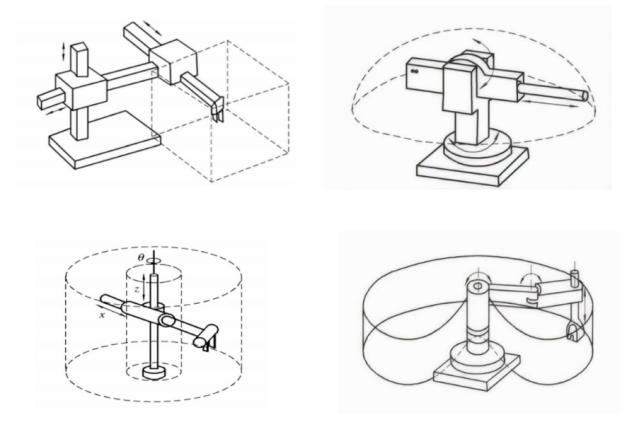
图1 现有各类结构机械臂的工作空间
|
现有各类结构机械臂的工作空间受限于其机械构型而难以扩展,不同构型机械臂呈现出显著的操作特性差异。直角坐标型机器人通过三轴直线运动实现定位,具有定位精度高、避障能力强的优势,但存在运动速度低、结构复杂等问题。圆柱坐标型机器人采用旋转与直线复合运动方式,其运动控制简便且定位准确度高,但系统占地面积较大且机械结构复杂。球坐标型机器人具有轻量化、结构紧凑及多机协作的优势,但在负载工况下稳定性不足且动态避障能力较弱。关节型机器人展现出结构紧凑、运动灵活、协同作业能力强等特点,但存在定位精度偏低和机械结构复杂的缺陷。并联机构机器人能够处理复杂曲面加工任务,但其工作空间受限、运动控制复杂且存在位姿误差累积问题。各类构型机械臂在运动性能、结构特性及作业能力方面均存在固有局限,直接制约了其工作空间的扩展潜力[1]。
|
|
|
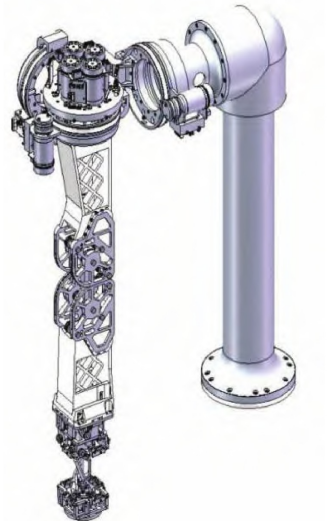
图2 哈尔滨工业大学7自由度仿人机械臂
|
近年来,国内机械臂领域研究取得显著进展,尤其在冗余机械臂结构设计、柔性驱动技术及混联机构优化等方面成果突出。哈尔滨工程大学的吴志伟等(2023)设计了肩、肘、腕分模块的7自由度仿人机械臂,采用闭环绳索驱动和拮抗关节设计,实现了高刚度与轻量化的平衡[2]。李研彪等(2020)创新性地设计四自由度串并混联拟人机械臂,结合并联机构的高刚度与串联机构的大工作空间优势,实现了动载协调分配[3]。中国科学院长春光学精密机械与物理研究所一团队采用正态分布对求取机器人工作空间的蒙特卡洛法进行改进。用归一化可操作度指标分析机械臂运动的灵活性,最终研制了面向空间的9自由度超冗余串联机械臂,该机械臂由一种大输出力矩、大减速比、小关节长度的机械臂关节组成,具有结构紧凑、负载大以及结构互换性好等特点[4]。佃松宜等(2024)系统综述了线驱柔性机械臂在变电站检修、核电管道检测中的实践,指出其核心挑战在于形变控制与传感精度[5]。赵智远等(2019)提出改进蒙特卡洛法与体元化算法,精确计算9自由度机械臂的工作空间体积,筛选出最优构型[6]。北京工业大学一团队提出了一种新的自运动流形计算方法。该方法基于人工蜂群算法完成自运动流形各分支初值的搜索,解决了分支初值难以确定的问题[7]。国内还有学者从仿真平台入手,开发基于开放图形库的综合数字化仿真平台ManiKASim。它可以随时更改或者替换机械臂的正运动学、逆运动学、奇异分析、可达工作空间、灵活工作空间和姿态空间等模块的算法,提供了机械臂3D模型控制及运动学功能模块的可视化和表格表示,具有任意视野虚拟操控、全方位观察等功能[8]。综合国内研究趋势,未来机械臂技术将围绕、结构创新与轻量化、高精度控制技术等方向深化发展,但仍需突破柔性驱动可靠性、混联机构实时控制等关键技术,以推动机械臂在工业、医疗等场景的实用化进程。
|

|
|
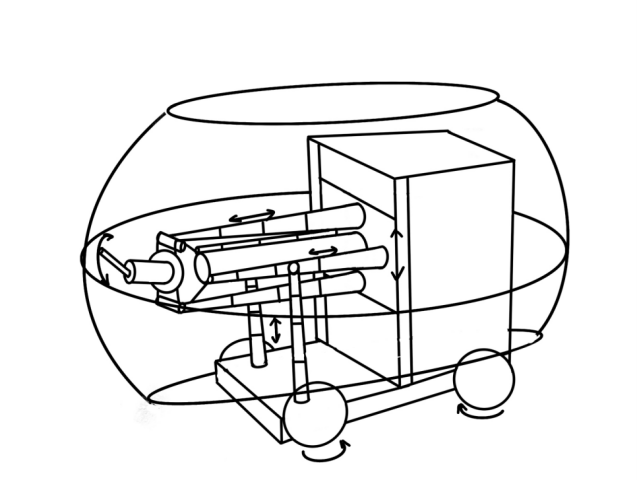
图3 美国东北大学仿象鼻柔性机械臂
|
国外研究起步较早,美国东北大学团队在仿生机械臂领域取得显著进展,其仿象鼻与章鱼触手的柔性机械臂设计通过刚柔混合结构实现了高刚度与运动柔顺性的平衡。近年来,刚柔混合分段驱动结构成为主流,结合弹性件与刚性杆件的优势,既保留柔性机构的适应性,又通过刚性组件提升负载能力与精度。并联机构因其闭链结构的高刚度和低误差累积特性,在精密装配领域得到广泛应用,但其奇异位形问题限制了工作空间。为解决这一问题,研究者提出离散式纯刚性全驱动结构,通过模块化设计提升运动精度,但体积与能耗问题仍需优化。动态仿真与力学建模技术的进步为连杆组优化提供了新思路,例如有限元分析法在材料力学性能分析中的应用,有效降低了运动惯性带来的能量损耗[9-11]。
综上所述,未来机械臂技术将围绕三大核心方向深化发展:一是构型创新,通过混联机构、仿生设计平衡刚度与灵活性;二是驱动技术革新,发展轻量化高精度驱动系统;三是智能控制突破,结合先进算法提升复杂环境下的运动规划能力。然而,柔性驱动可靠性、实时控制精度、能耗优化等关键技术瓶颈仍需攻克。随着材料科学、智能算法等跨学科技术的融合,机械臂有望在工业精密操作、医疗微创手术等领域实现更广泛的应用突破。
3、研究热点趋势:基于并联结构的三指灵动手的研究热点主要包括以下几个方面:
技术优化:研究如何提高基于并联结构的三指灵动手的抓取精度、速度和稳定性,以及如何减少能耗和噪声。
应用拓展:研究如何将基于并联结构的三指灵动手应用于更多的领域和场景,例如医疗、救援、辅助生活等。
智能化控制:研究如何通过人工智能、机器学习等技术,实现基于并联结构的三指灵动手的自主化和智能化控制。
人机交互:研究如何通过人机交互技术,实现人与基于并联结构的三指灵动手的互动和协作。
(三)研究意义:
1.落实国家智能制造政策导向,聚焦国产化核心需求
围绕《中国制造2025》关于“提升制造业核心竞争力”的战略目标,结合《“十四五”智能制造发展规划》对工业母机自主化的重点部署,以及工信部关于智能传感与协同控制技术攻关的专项支持政策,本项目聚焦当前国产制造装备在精密加工、复杂环境作业中存在的精度稳度不足、柔性适配性差等问题,创新设计机器人,响应国家政策,助力制造业智能化升级。
2.构建刚柔并济的智能执行系统,多工序一体化提升
传统机械臂型机器人存在显著技术问题:串联式结构因自由度约束导致灵活性不足,并联机构虽刚度优异但工作空间受限且易出现奇异位形。两类机械臂均面临稳定性问题,包括误差累积和抗干扰能力不足。现有控制策略难以应对非线性扰动和机械磨损,且能效比和环境适应性较差。目标通过结构优化与智能控制算法的协同创新来为这些问题提出解决思路与方案,提升制造机器人综合性能。
3.提出国产装备新方案,赋能多领域智能化升级
高精度高智能化的进口机械臂动辄数十万元的价格与复杂的运维要求,这在一定程度上限制了其在各领域的普及应用。本项目希望为该问题提出一种基于新型结构设计与模块化架构的解决方案,旨在提升基础型机器人的综合性能性能。通过优化设计,使该技术能够适应物流运输、生产制造及医疗辅助等多元化应用场景,从而推动智能制造技术从实验研究向实际生产环境的转化。目标为降低技术门槛而非追求高端,让中小企业用得起、让基层医院敢尝试、让学生团队能参与。
三、关键技术以及技术原理
3.1 串联与并联传动机构刚柔耦合优化——传动机构及执行系统
在竖直方向传动机构中,采用滚珠丝杆替代传统齿轮齿条或皮带传动,作为核心动力传递单元。通过电机与滚珠丝杆通过联轴器连接,两端分别由电机支座和轴承支座内的轴承支撑;滚珠丝杆上的导向螺母与两侧对称布置的线轨滑块共同连接定平台组件,线轨及支座均固定于支架上形成传动系统。通过电机驱动滚珠丝杆旋转,带动导向螺母及定平台组件实现高精度升降运动。
建立特殊混联机构作为传动主体,其由六组连杆组成,第一/第三驱动连杆采用电机-移动副-转轴串联结构,通过直线推拉直接驱动动平台,构成平面内主运动链;第二/第四驱动连杆引入球铰-虎克铰-移动副复合铰链,兼容空间多向运动,并设置一增强刚性的中部冗余连杆;冗余驱动连杆以虎克铰-移动副-转动副串联结构并联于主驱动链,形成双重约束,调节末端执行器的位置姿态。设计一定平台组件连接并联机构与滚珠丝杆,平台集成三级正交转动副(第一、第二转动组件)与滚珠滑座,实现绕X/Y轴的解耦转动与Z向滑动。其底部通过滑块与线性驱动系统刚性连接,将直线输入转化为平台的复合运动。中心杆组件通过滑动板-滚珠滑座导向结构与定平台联动,中心杆顶端连接动平台,末端承载八组轴承支撑的驱动连杆接口,形成四对对称分布的驱动连接点。通过线性传动机构与混联机构的配合最终实现末端执行器的复杂三维运动控制。
|

|
|
图4 混联机构设计
|
3.2 麦克纳姆轮全向运动学建模——运动方式
针对本项目需求,为提高机器执行稳定性并确保设计功能完整,本项目在传统串联机械臂结构基础上优化了运动平台设计。为解决空间占用大、能耗高的问题,设计基于麦克纳姆轮的全向移动底盘。该底盘采用四个呈45°斜角布置的麦克纳姆轮,根据长方形布局进行四轮同步控制。通过程序控制四个轮子以不同转速组合运转,使AGV无需转向即可完成平面内任意方向的平移、原地旋转及复合运动,相比传统AGV提升空间利用。并且为降低制造成本,本项目采用碳纤维复合材料替代了部分的金属构件,使整体重量降低。同时引入3D打印技术定制轮体结构,通过拓扑优化设计将轮毂辐板减小厚度,大大降低加工成本。优化后的AGV能够在极小空间内完成360°旋转,且大大提高了横向平移精度,满足狭窄空间作业需求。同时,与其他驱动轮相比,麦克纳姆轮的精度和承载能力非常高,高精度和高承载力意味着机器人在工作有着很高的可靠性。并且麦克纳姆轮的机械结构可以避免地面的不平整而引起的颠簸,有着较高的平稳性。
根据上述各机构协同作用,最终通过其下方智能化AGV,及多组连杆共同运动来使达到精确低磨损低消耗的快速运动定位物体,并且其下方的两组冗余连杆可以规避并联结构的奇异位置,以此达到更大范围的运动空间并且降低危险系数。
|
|
|
图5 本作品机器人工作空间
|
3.3 电动气动混合驱动系统动态匹配——驱动方式
为提升执行系统的运行稳定性,本研究采用混联机构构型,通过系统对比不同驱动方式的特性参数,对各传动链结构进行运动学分析,并结合材料力学性能与弹性变形特性研究,运用Solidworks软件开展有限元仿真分析。最后必须统筹考量机器人的全域自主运动能力与气源供给及电池能量密度之间的矛盾关系。基于上述研究,最终确定采用电动气动混合驱动模式,各串联部分传动机构上选用传统方案的伺服电机与谐波减速器以提高操作精度,主传动链上考虑的选用双作用气缸与驱动器以满足快速响应和维护简单的需求,同时分析气体可压缩性导致的刚度非线性问题,通过有限元软件进行非线性仿真,以初步预测结构的响应。该方案能够根据不同执行部位的工况需求进行针对性匹配,在确保高刚性稳定性的同时,有效提升系统的控制精度。
|
|
|
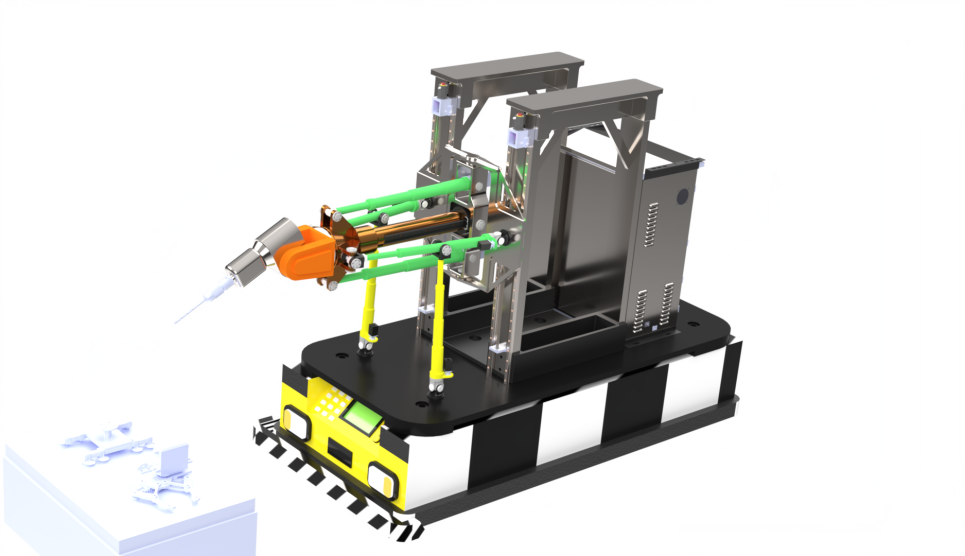
图6 机器人整体
|
3.4 多异构数据融合与控制系统利用——控制部分
选用红外传感器,距离传感器,温度传感器及视觉传感器,通过深度学习的方法对多个传感器采集到的数据进行数据解析与处理,系统对环境的感知能力和控制精度,实现智能化、精细化的控制。设计机器人的控制系统,包括硬件和软件部分。硬件部分需要考虑到控制器的性能、稳定性和可靠性,能够在高湿、高压、高粉尘的恶劣环境中稳定运行,选择耐高温的电线、电缆、电子元件等;软件部分则需要借助C++或Python编写控制算法,实现机器的自适应运动控制、传感器数据融合、精准定位及危险预警和自动避险等功能。
四、 创新点及其特色
作品创新点
1.刚柔并济的结构——精度与负载兼得
建立了由六组连杆构成的特殊混联机构作为传动机构,由4组主驱动连杆+2组冗余单元,多支链共同承力,并且创新性地使用冗余连杆置于中部以增强刚性提升稳定度;冗余驱动连杆以串联结构并联于主驱动链,形成双重约束,调节末端执行器的位置姿态。创新性使用滚珠丝杆作为核心动力传递单元,使用滚珠丝杆滚珠丝杆替代传统齿轮齿条或皮带传动,通过电机驱动滚珠丝杆旋转,带动导向螺母及定平台组件实现高精度升降运动。
2.全域智能运动能力——动态环境适应
选用多类型传感器,提出了通过深度学习对多以异构数据处理融合的方法,结合联邦滤波算法实现闭环控制,创新性地集成AGV麦克纳姆轮全向底盘与多自由度混联机械臂,基于冗余连杆规避奇异位形,使机器人具备自主规划路径并同步调整姿态的能力,实现全域连续无中断的运动,同时提升环境感知能力,达成更智能、精细的控制,并显著降低危险系数。
作品特色
作品以全域操作-刚柔复合-智能协同为特色,具有高承载、高精度、高稳定的特点。
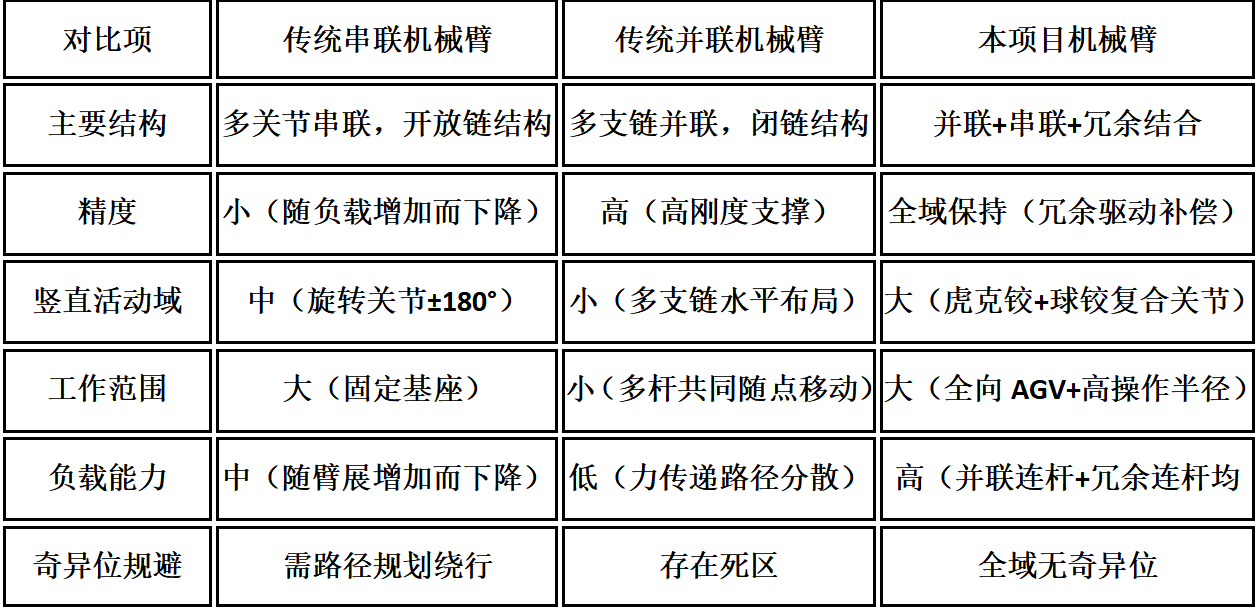
表1 本项目与传统方案对比
兼具卓越稳定性和高承载能力的复合机器人系统
该系统采用滚珠丝杆与混联机构相结合的复合传动方案,通过六组连杆构建空间多向运动系统,其冗余连杆设计显著提升了系统刚性。系统集成了麦克纳姆轮全向移动底盘,该机械结构可有效消除地面不平整导致的颠簸,确保运行平稳性。在控制方面,创新性地采用联邦滤波智能控制系统,通过多传感器数据融合技术实现动态避障与路径规划功能,从而达到较高的运动定位精度。
五、预计应用前景
高刚度混联式全域柔性作业机器人具有高精准度、高稳定性与良好的柔性适配性,其应用前景非常广泛。以下是预计的高刚度混联式全域柔性作业机器人的应用前景:
1.高端制造业:在汽车、航空航天、精密仪器等制造领域,其高刚度和高精度特性使其胜任精密零部件装配、重型工件搬运、高精度点位加工等任务,显著提升生产线的自动化水平和产品质量稳定性。












