一.项目概括
针对目前小型垃圾清扫车存在的问题,本装置结合SLAM、机器视觉、ROS等技术,设计了一款以三元锂电池为能源的无人驾驶路面垃圾清扫智能小车,具有灵活、高效、智能化的特点。该小车可按规划的路线自主完成对路面垃圾的清扫,包括路牙、公共长椅底部等清扫死角处垃圾,并将吸拾在垃圾箱中的垃圾按可回收和不可回收进行分拣在对应种类的垃圾箱内。装置整体二维图如图1所示。
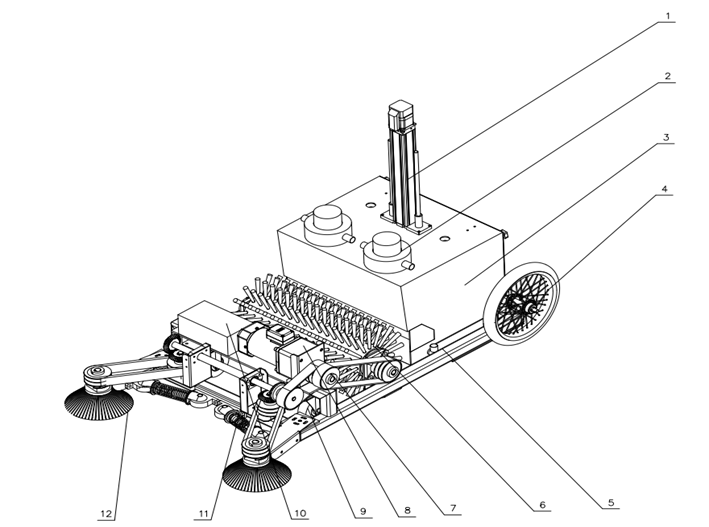
1——垃圾分拣总成 2——风机 3——垃圾储存箱 4——后轮 5——机架 6——滚刷 7——带轮 8——V带 9——电机 10——电池 11——铰链 12——盘刷
图1 装置整体二维图
二.装置功能设计
本装置具有以下基本功能:①无人驾驶功能:通过激光雷达采集的周围环境信息进行实时定位,小车自主按A*和DWA算法规划的清扫路行驶;②垃圾清扫功能:小车行驶时利用双盘刷将路面两侧垃圾清扫聚拢在小车中间,然后通过滚刷将垃圾卷入垃圾收集箱中;③垃圾分拣功能:对垃圾箱中垃圾按可回收和不可回收两类进行识别,利用机械臂将垃圾分拣至对应的垃圾箱中;④远程监控功能:通过电脑等终端远程查看小车的剩余电量、清扫进度等信息,并发生故障时发出警报。小车基本功能如图2所示。
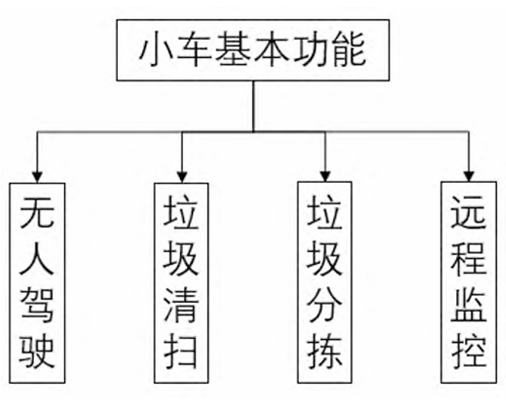
图2小车基本功能示意图
三.装置设计分析
3.1整体结构设计
本装置整体结构需紧凑且布局合理,以确保各功能部件协同工作流畅。车身框架采用坚固耐用的金属材质,如铝合金,既保证强度又减轻重量。车架设计要考虑到重心分布,使小车在行驶和清扫过程中保持稳定。分为清扫作业区、垃圾存储区和动力驱动区等几个主要部分。还有一部分用于安置电子控制设备。清扫作业区位于车身底部前方,垃圾存储区在中部或后部,动力驱动区合理分布在车轮附近,便于动力传输。装置整体二维图如图3所示。装置整体尺寸如表1所示。
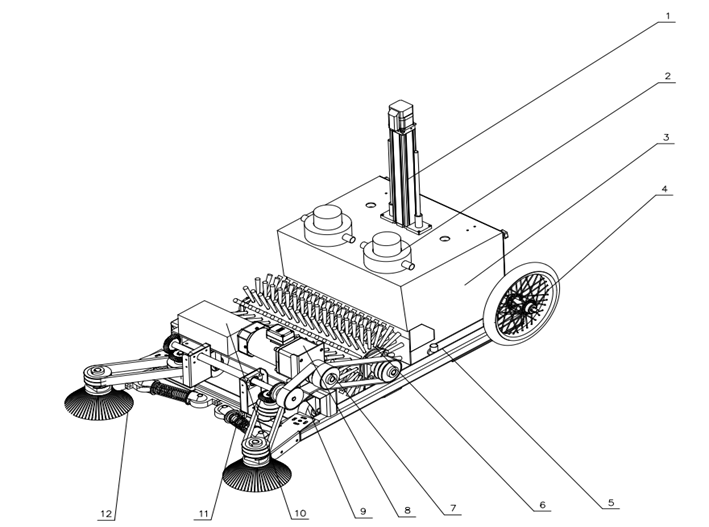
图3 装置整体二维图
表1 装置整体尺寸
|
|
长
|
宽
|
高
|
直径
|
|
桶
|
500mm
|
432mm
|
310mm
|
|
|
轮
|
|
|
|
230mm
|
|
盘刷
|
|
|
60mm
|
200mm
|
|
总体
|
1200mm
|
650mm
|
900mm
|
|
3.2清扫装置设计
3.2.1清扫机构
采用盘刷旋转清扫机构,由电机驱动,其旋转轴安装位置和角度可调节,以适应不同路面坡度和清扫需求。对于路边沿的清扫,可将旋转轴调至适当倾斜角度。盘刷旋转清扫机构二维图如图4所示。
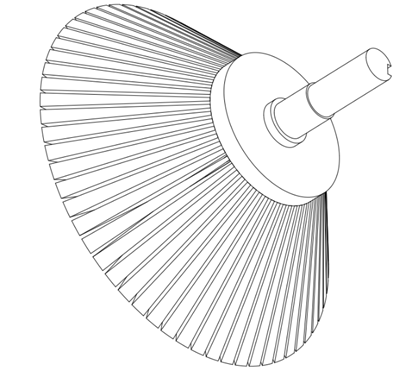
图4盘刷旋转清扫机构二维图
3.2.2吸尘装置
吸尘装置与盘刷旋转清扫机构配合使用,在其后方设置吸尘口。风机是吸尘装置的核心部件,其功率根据小车整体清扫能力和作业环境而定,以产生足够的吸力。吸尘管道短且直,减少空气阻力,提高吸尘效率。吸尘装置二维图如图5所示。
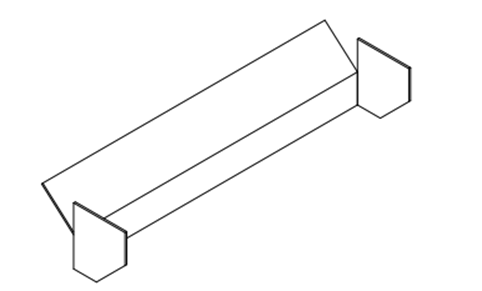
图5吸尘装置二维图
3.3垃圾处理装置设计
本装置的垃圾处理装置由垃圾分拣装置、垃圾储存箱、垃圾收集斗构成。垃圾处理装置二维图如图6所示。
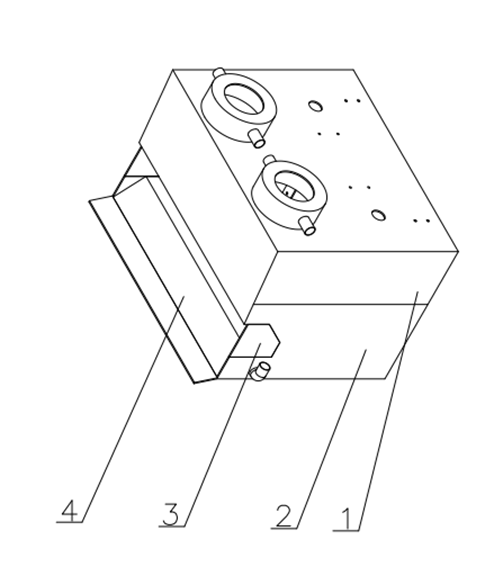
1——垃圾分拣装置 2——垃圾储存箱 3——吸尘装置 4——垃圾收集斗
图6垃圾处理装置二维图
3.3.1垃圾分拣装置
垃圾分拣装置安装在小车尾部,由双目相机,垃圾储存箱、皮带滑轮步进电机驱动的直角坐标系式机械臂、可倾倒的可回收和不可回收垃圾收集箱等组成,垃圾进入垃圾储存箱后,由双目相机进行识别,得出识别检测结果,将数据传输至机械臂,机械臂进行垃圾分拣工作。机械臂二维图如图7所示。
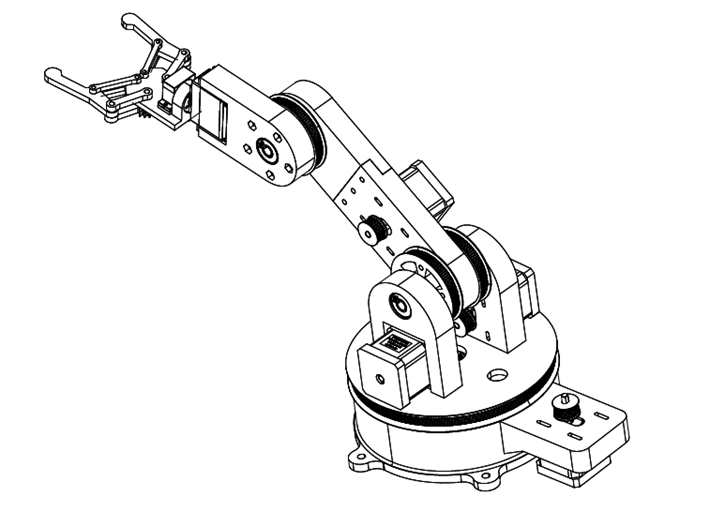
图7机械臂二维图
3.3.2垃圾存储箱
垃圾存储箱采用密封设计,防止垃圾异味散发和渗漏。箱内设置垃圾压缩装置,通过机械或液压方式将垃圾压实,增加垃圾存储量。存储箱的卸料方式便捷,采用侧翻式或后开门式设计,方便与垃圾转运车对接。
3.3.3垃圾收集斗
垃圾收集斗位于清扫机构后方,其形状和大小与清扫范围及垃圾量相匹配。收集斗采用金属或高强度塑料制成,具有一定的耐磨性和耐腐蚀性。入口处宽大且呈倾斜状,便于垃圾顺利进入,内部设置导流板,引导垃圾流向存储区。
3.4动力与传动系统设计
3.4.1动力源
本装置采用电力驱动。以高容量的三元锂电池为能源,具有环保、低噪音等优点,适用于城市道路、公园等对环境要求较高的场所。
3.4.2传动系统设计
3.4.2.1电动机选型
本装置采用三相异步直流电机直接驱动车轮或通过减速器、传动轴等部件间接驱动,将动力从动力源传输到驱动轮。其传动效率高、动力损失小,并且能够根据不同的路况和作业需求调整车速和扭矩。例如,在爬坡或清扫重载垃圾时,能够提供较大的扭矩。三相异步直流电机二维图如图8所示。
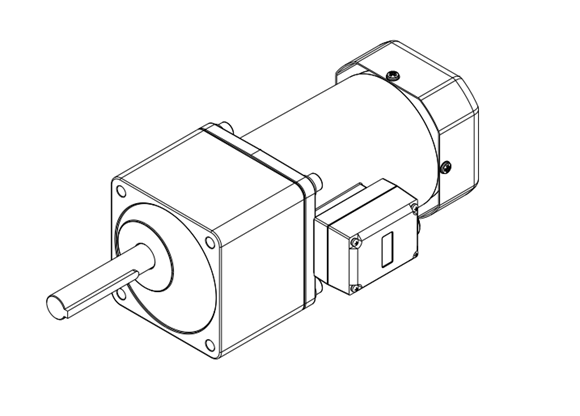
图8三相异步直流电机二维图
3.4.2.2 V带传动机构设计
自走式路面垃圾清扫小车采用V带传动,可缓冲吸振,运行振动能被其弹性缓冲,减轻对动力源及部件损害;能过载保护,遇异物卡刷致负载突增时打滑避免电机等损坏;且结构和成本优势显著,带与带轮机械结构简易、成本低,普通V带价廉易购易换。V带机构二维图如图9所示:
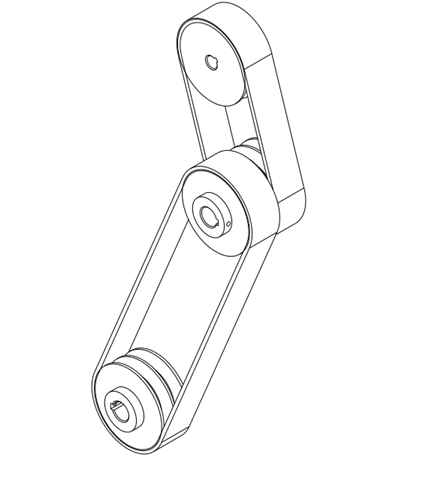
图9 V带机构二维图
3.5行走与转向系统设计
3.5.1行走系统
本装置行走系统包括驱动轮和从动轮。驱动轮为后轮,配备高性能的轮胎,轮胎花纹要适应不同路面,如在湿滑路面有良好的排水性和抓地力,在粗糙路面有较强的耐磨性。后轮二维图如图13所示。
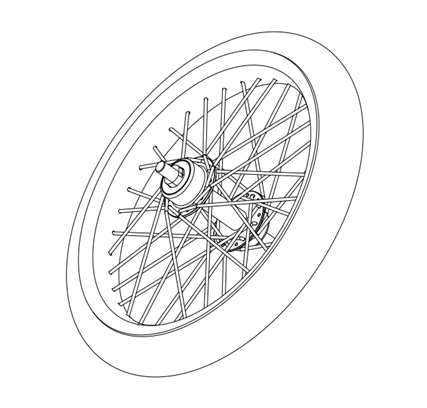
图13 后轮二维图
3.5.2转向系统
本装置为前轮转向。前轮采用万向轮,转向机构通过转向电机控制万向轮的转向角度。转向系统具备精准的操控性和良好的响应速度,使小车能够在狭窄的街道和弯道灵活转向。万向轮二维图如图14所示。
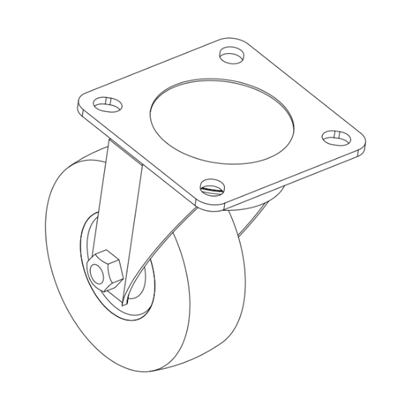
图14 万向轮二维图
3.6智能控制系统设计
3.6.1定位与导航系统
该系统的硬件系统主要由移动系统、IMU、3D激光雷达和树莓派(ROS主控)等组成,硬件系统框架如图15所示。
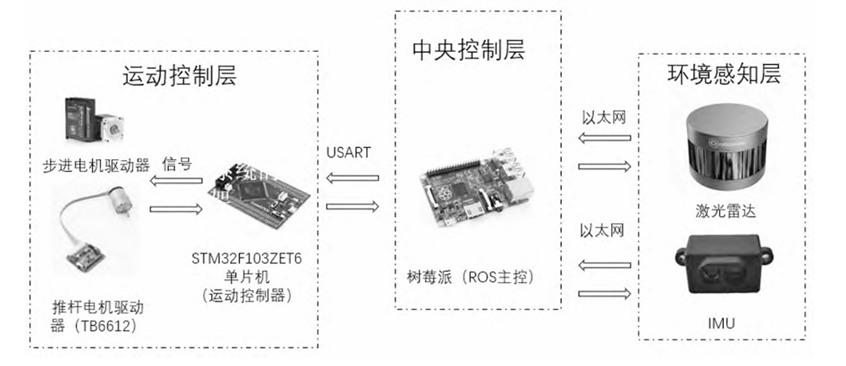
图15 定位与导航系统的硬件系统框架
基于ROS开发了软件系统,软件系统框架如图16所示。软件系统负责解析IMU和激光雷达采集的周围环境数据,通过SLAM算法运算实现小车在室外环境的定位和对清扫路线进行建图,并使用A*算法(全局路径规划)与DWA算法(局部路径规划)规划路径后向移动系统的运动控制器STM32F103ZET6发送控制指令。
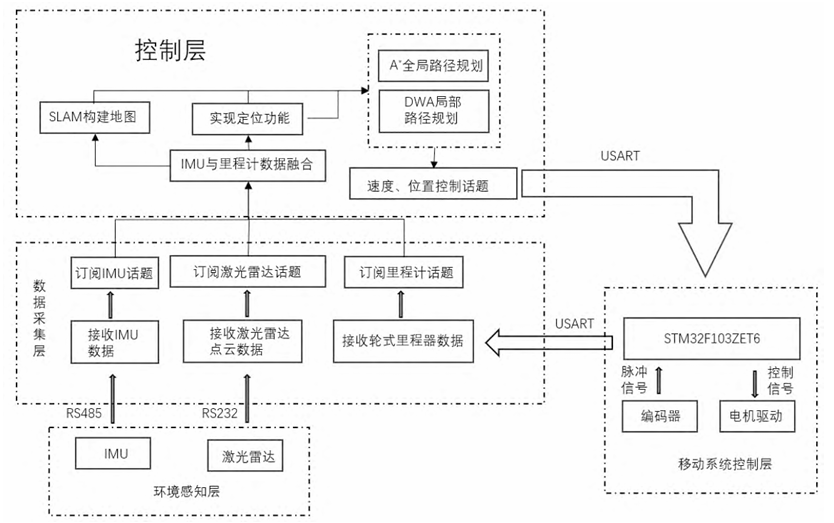
图16定位与导航系统的软件系统框架
3.6.2垃圾分拣系统
该系统的硬件系统主要由垃圾分拣装置、双目相机、树莓派等组成,硬件系统框架如图17所示。软件系统框架如图18所示。双目相机实时拍取混合垃圾箱的图像并发送给树莓派,通过部署在ROS主控的YOLOv5s目标检测算法识别目标垃圾并获取目标垃圾在相机坐标系的三维位置信息,利用TF包将相对摄像头的坐标信息转化为在世界坐标系的三维坐标信息,随后向STM32F103ZET6单片机发送机械臂垃圾储存箱中步进电机转动角度和速度的控制指令,使机械臂运动至目标垃圾上方,随后对目标垃圾进行抓取并放至对应种类垃圾收集箱。
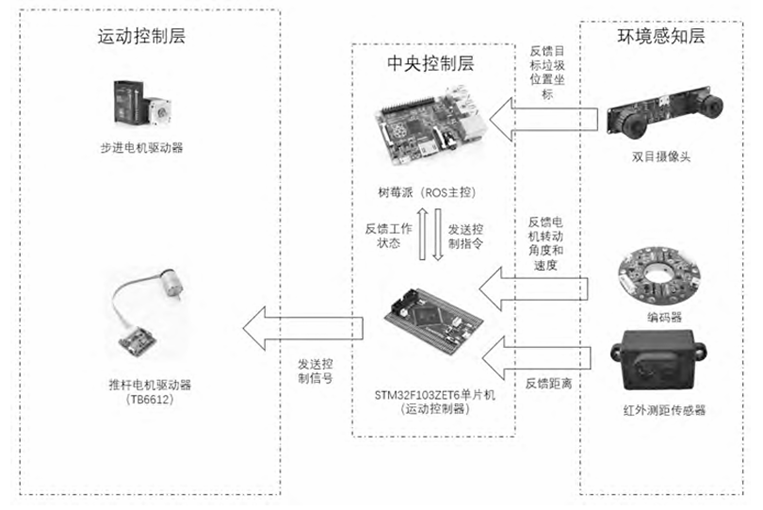
图17 垃圾分拣系统的硬件框架
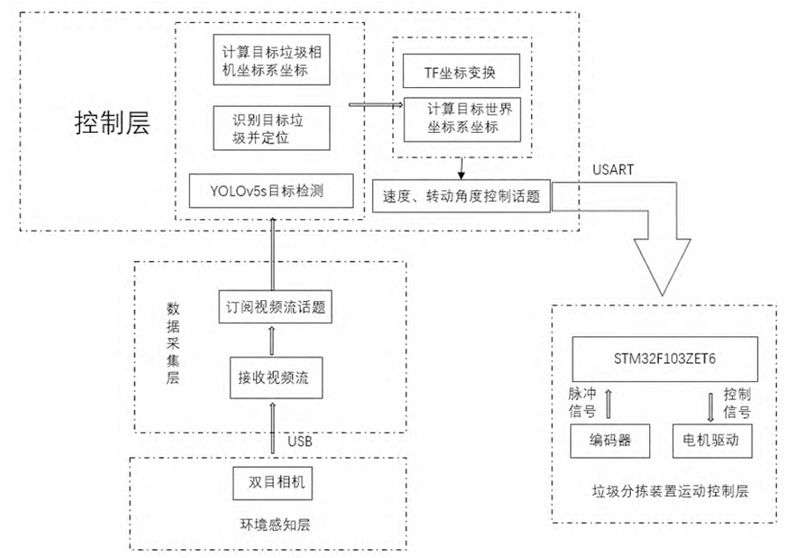
图18 垃圾分拣系统的软件框架
3.6.3人机交互系统
该系统的硬件系统主要由触摸屏、扬声器、树莓派、 远程控制终端等组成,人机交互的硬件系统框架如图19所示。
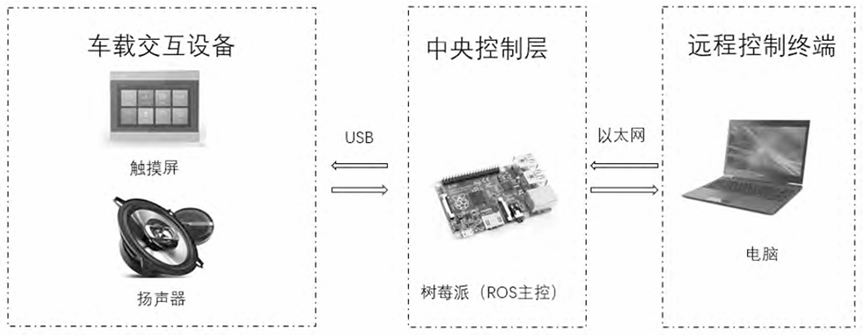
图19 人机交互的硬件系统框架
软件系统框架图如图20所示。通过车载触摸屏向小车设置清扫路线等控制指令并查看小车剩余电量、垃圾存储情况等信息,在遇行人干扰时,可通过扬声器提醒行人注意避让。同时借助服务器作为数据和控制指令中转站,电脑等远程终端通过TCP通信协议与小车发送控制指令和查看小车状态信息。
图20 人机交互系统的软件框架
四.装置可行性分析
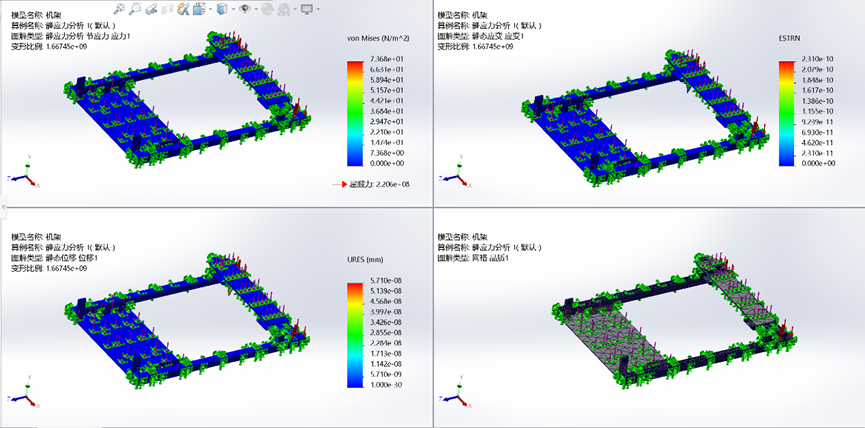
图21 机架应力分析
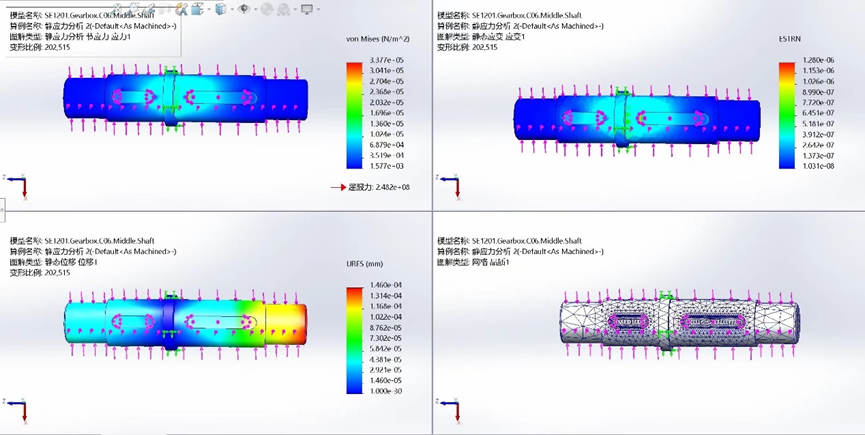
图22 主轴应力分析

图23 收集斗应力分析
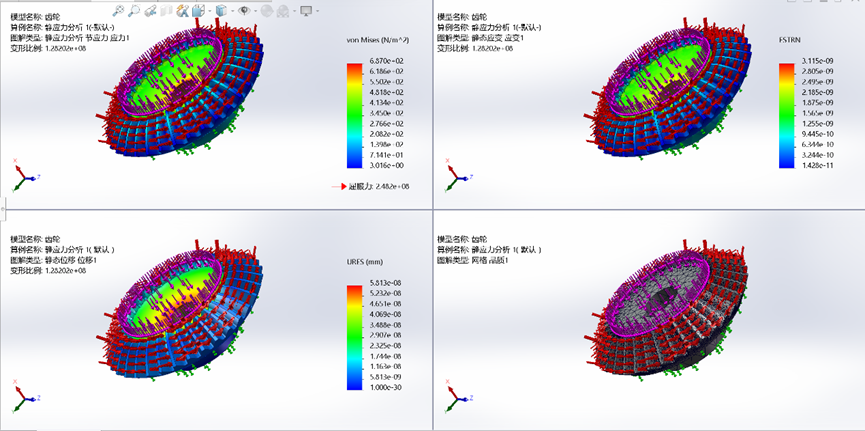
图24 齿轮应力分析
利用simulation软件对本装置上关键部件高速轴进行应力分析,应力分析结果显示各个部件在各种工况下的应力、变形以及安全系数等指标都满足预期设计要求,力学性能合理,能够保证其正常运行,符合该零部件设计的严格要求。


























