1.开发背景、结构说明、功能与使用说明
1.1开发背景
从环保角度看,当前垃圾运输存在“滴撒漏”、高排放问题,研究智能垃圾运输车能借助先进密封、除臭技术,杜绝运输中的二次污染;通过优化路线,降低燃油消耗,减少尾气排放,助力环保目标达成。经济层面,传统垃圾运输效率低、成本高。智能垃圾运输车可通过智能调度实现最优路线规划,减少空驶里程,降低燃油与人力成本;其故障预警系统能提前发现隐患,降低维修频次,延长车辆使用寿命,提高企业经济效益。社会层面,它能提升城市形象与居民生活品质,彰显城市现代化管理水平。先进的垃圾运输减少病菌传播,保障居民健康。而且,智能技术的应用催生新岗位,促进就业结构优化,推动社会可持续发展。
1.2结构说明
本装置主要组成部分有步进电机、智能传感器、OPEN MV 摄像头、PLC控制器、灯光控制系统、垃圾箱自锁机构、起重机构、机械臂抓取机构、液压机构、齿轮机构、运动机构、车外壳组成。步进电机,PLC,传感器控制系统构成无人驾驶运输系统。液压装置,齿轮机构,步进电机驱动机构,吸盘和喷头构成垃圾回收机构,PLC 控制器、智能传感器、三相步进电机、GPS 模块、OPEN MV 构成智能控制装置。
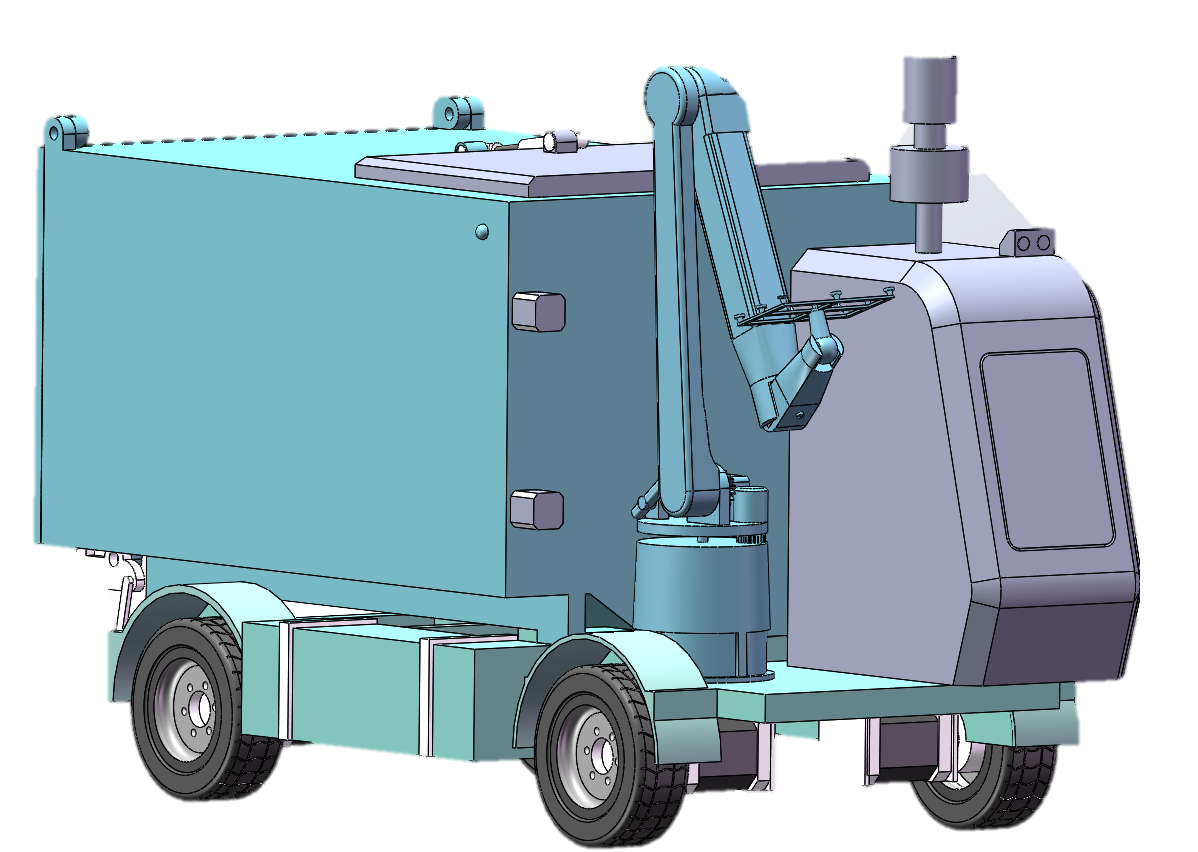
整体结构图
1.3功能
这款无人垃圾车具备高度自动化功能。启动后自检初始化,通过激光雷达与视觉传感器感知环境,实现自主路径规划和无人驾驶。抵达收集点后,精准控制机械臂完成垃圾桶抓取、开盖、倾倒和归位全套操作,全程无泄漏。内置消毒系统自动喷洒消毒水,保持卫生;红外传感器实时监测垃圾量,满载后自动前往处理站。黑水箱收集污水,避免污染。所有运行数据实时回传后台,支持远程监控与干预,实现高效、清洁的全自动垃圾收集。
1.4使用说明
无人垃圾车在接通电源后,首先进行初始化设置。此时,车辆的控制系统会对所有步进电机进行置位,确保它们处于合适的起始状态。步进电机是控制机械臂、车轮等设备运动的重要部件,确保其处于正确位置是操作顺利进行的前提。车辆内部配有超大容量的电池组,能够为整车提供长时间的动力支持。电池组是无人垃圾车的核心动力源,它通过电动驱动系统为车辆的行驶、机械臂操作、传感器工作等提供能量。为了保障系统的稳定性与安全性,车辆的控制系统会持续进行全身状态监测,实时收集和分析各部件的数据,包括电池电量、机械臂的运行状态、传感器的工作情况等。这些数据会实时反馈给后台,若出现异常情况,系统会立刻发出警报,后台人员能够快速远程检查并进行必要的修复。
2.设计原理、设计方案
2.1设计原理
这款无人垃圾车的设计原理基于高度集成的自动化与智能感知系统。其核心是通过多传感器融合(激光雷达、视觉传感器、GPS)实现环境感知、精确定位和自主导航。控制系统作为大脑,依据传感器数据规划行驶与作业路径,并借助步进电机实现机械臂的毫米级精准控制,完成垃圾桶的抓取、提升、倾倒和归位全套动作。同时,通过红外测距传感器实时监控车厢与垃圾桶的满载状态,驱动任务决策。整车由大容量电池组驱动,并具备状态自检、远程监控及污水收集、自动消毒等辅助功能,从而实现全流程无人化、高效清洁的智能作业。
2.2设计方案
该无人垃圾车的设计方案以PLC控制器为核心,构建了集感知、决策、执行于一体的自动化系统。通过融合OPEN MV视觉模块、激光雷达、GPS与多种传感器,实现自主路径规划与精准环境感知。其执行机构由步进电机驱动的机械臂、液压系统与齿轮机构组成,负责完成垃圾桶的精确定位、抓取、开盖、倾倒、消毒及归位全套动作。同时,车厢配备红外测距传感器监控垃圾容量,并集成黑水箱与消毒系统,确保作业高效、卫生。整个系统具备远程监控与自检功能,实现了从收集、运输到状态反馈的全流程无人化智能操作。
3.完整性、规范性、可行性、创新性
3.1完整性
本作品具备高度的系统完整性。它集成了机械、电气、传感与控制四大系统,构成了一个功能闭环的有机整体。从自主导航、精准识别到机械臂抓取、倾倒、消毒及污水收集,实现了垃圾收集全流程的无人化作业。同时,配备了完善的状态监测、远程通信与故障报警机制,确保了系统运行的稳定性与可维护性。其设计覆盖了从初始化和路径规划到任务终结和休眠的完整工作周期,各项功能衔接紧密,展现了成熟可靠的完整产品形态。
3.2规范性
本作品在设计上严格遵循行业规范与标准,具备高度的规范性。硬件方面,其核心部件如步进电机、PLC控制器、传感器等均选用符合国际电工委员会(IEC)等权威标准的工业级产品,确保了基础的可靠性与互操作性。软件与控制逻辑的开发遵循模块化、结构化的设计原则,代码编写符合行业通用规范,保证了系统的可维护性与可扩展性。在功能安全上,集成了完备的状态监测、故障诊断与远程报警机制,符合机械设备安全设计的基本要求。通信协议采用标准化接口,便于与城市管理后台系统进行数据对接与集成。整机设计充分考虑了人机工程学与作业安全,其工作流程和防护措施符合环卫设备的相关操作规范。因此,该设计不仅在技术上是可行的,更在标准遵循和行业适配层面展现出显著的规范性,为产品的产业化与规模化应用奠定了坚实基础。
3.3可行性
本作品在技术可行性上具备坚实基础。其核心子系统,如基于多传感器融合的自动驾驶、PLC工业控制、高精度机械臂等,均为当前成熟技术的整合与应用。硬件上,步进电机、激光雷达、视觉传感器等均为市场可采购的标准工业部件,供应链完善。软件算法层面,路径规划、环境识别与运动控制虽有较高技术要求,但相关算法在机器人及自动驾驶领域已有广泛应用和开源方案参考。整个系统采用模块化设计,各功能单元相对独立,既降低了研发调试的复杂度,也便于后期的维护与升级。因此,该设计在工程实现上风险可控,具备较高的落地可行性。
3.4创新性
本作品在创新性上实现了多维度突破。技术上,率先将多传感器融合的自动驾驶方案应用于环卫领域,通过自主研发的路径规划算法与边缘计算架构,赋予车辆在复杂城市场景中全天候精准作业的能力。设计上,创新采用模块化架构与智能水循环系统,既实现了功能的灵活扩展,又达成了水资源高效循环利用。模式上,开创了"硬件+数据+服务"的商业模式,将设备运维与城市管理深度结合,提供全生命周期服务。同时,通过人机协同交互与AR技术应用,重构了环卫作业方式,既提升了运营效率,又创造了新的社会价值。这些创新点相互支撑,共同构成了产品的核心竞争力。





