一、设计背景
21世纪是人类向海洋进军的世纪。海洋作为人类尚为充分开发开发的宝地,仍具有极大的探索价值。水下机器人作为一种技术手段在海洋开发和利用领域具有十分重要的作用。而我们小队就是在此大环境背景下进行对水下机器人领域进行初步尝试。
源文件:
二、产品简介:
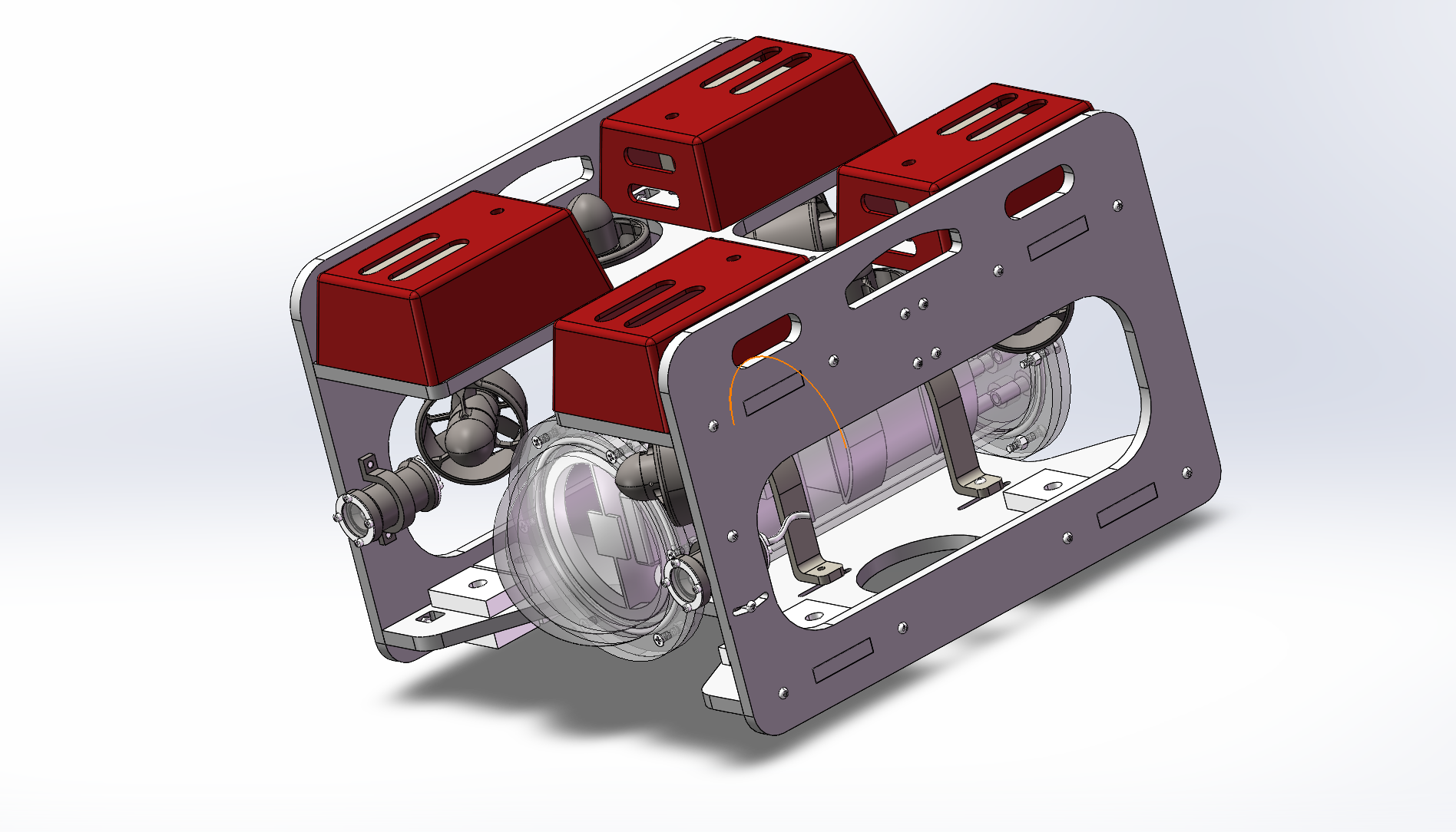
1.整体框架
我们的水下机器人是典型的开架式结构,包括一个亚力克密封舱,共有六只无刷推进器和两个照明灯,固体浮力材料和铅块配重分别位于最上部和最下部。电源采取的是可充电式锂电池组,通过密封穿线螺丝进行充电。同时配有树莓派和摄像机,实时观测水下机器人所处位置与状态。通过20m两芯零浮力电缆将电脑与水下机器人连接,实时传输图像并下达指令。
实物图如下:
2.设计说明
a.控制系统方面我们采用的是ArduSub,其是一个功能齐全的开源解决方案,具有广泛的开箱即用能力,包括反馈稳定控制、深度和航向保持以及自主导航,并且能与地面控制站软件无缝对接,可以监测载具遥测和执行。
b.结构方面我们采用典型的开架式结构,包含一个亚力克密封舱,内部装备有pixhawk2.4.8、电池、1080P摄像头等电子器件,外部带有六只无刷推进器和两只流明高亮LED补光灯,其中推进器排列结构是并排垂直推进器的矢量ROV。上端与下端分别装配浮力材料和铅块配重,舱体后部通过穿线螺栓将推进器,补光灯与内部电源连接,以保持供电。其余组件还有舱抱箍、润滑硅脂、分电板、电力猫、深度传感器、控制手柄、锂电池组防水充电器。
c.软件方面配置如下,下载QGround Control,将pixhawk2.4.8通过usb数据线与电脑连接,在firmware选项中刷取固件,选择ArduSub,pixhawk1版本。将树莓派上SD卡取出,插入读卡器并将读卡器插入电脑usb接口,用usb image tool刷去镜像文件Latest ArduSub-Raspbian image,再将树莓派外接显示屏,鼠标,键盘,并设置其为静态IP地址192.168.2.2。再打卡电脑网络适配器,将其IP地址设为192。168.2.1,设置成功后,通过windows+r快捷指令,打开运行窗口,输入cmd后进入界面,再输入ping 192.168.2.2指令查看返回值,判断是否连接成功。
三.功能
主动保持航向;深度保持:使用基于压力的深度传感器,ArduSub控制器可以将深度保持在几厘米以内;航向保持,默认情况下,当没有命令转弯时,ArduSub自动保持它的航向;摄像头倾斜,通过操纵杆或手柄控制器,通过伺服或万向节电机控制摄像头倾斜;灯光控制,通过操纵杆或手柄控制水下照明。
四.创新性
Pixhawk2.4.8是无人机飞控模块,其分辨率和灵敏度是毋庸置疑的,我们将其与树莓派结合,以树莓派作为“大脑”,将pixhawk2.4.8的各项参数进行调整,使其成功运用至水下机器人,并且完成了下水测试。同时我们采用穿线螺栓进行线路的连接,并用AB胶进一步密封,解决了水下电子器件防水问题。在选择推进器时,我们选择无刷推进器,在保证推进器的功能实现的前提下,无刷结构可以降低危险性和推进器损耗度。
五.应用
就目前的社会需求与应用形势而言,我们的水下机器人可以满足以下项目的应用:观察和探索;沉船发现和记录;摄影和摄像;船舶及设备检验;生物采样和调查;水下检索;学术及研究项目;水下机器人比赛。







