为改善救援机器人使用范围的局限性,设计了一款仿螃蟹水陆两栖救援机器人,如图1所示。首先,基于Solid Works建模,通过3D零件打印,再组装,完成仿螃蟹机器人结构设计制作;其次,选用合适微机,基于Arduino编程,完成机器人控制系统设计。与现有救援机器人相比,该机器人不仅具有灵活的“救援双钳”,可有效实施救援;而且具有平稳的多足行走机构和“正方形”身躯,即使侧翻,也易于翻回,可用作水陆两栖救援。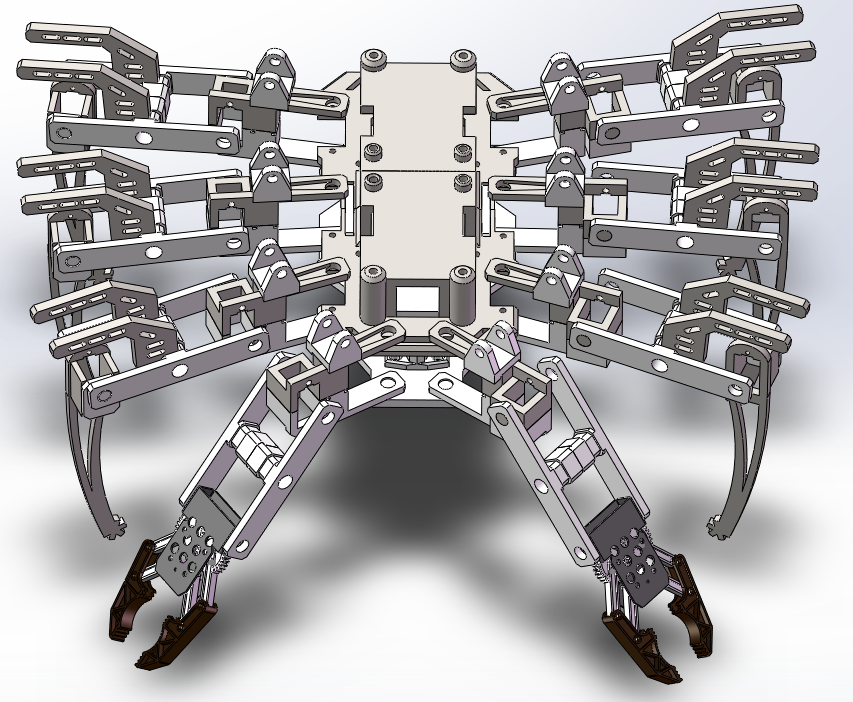
1.设计背景及意义
由于自然灾害、公共平安事件等因素而造成的灾难时常发生,救援机器人给予了救援人员很大的帮助,让搜救的成功率大大提高,同时也减少了救援人员的伤亡。因此,救援机器人的开展趋势大多投入到地震、煤矿坍塌、火灾、潜水等极限运动的救援中,为救援工作提供平安保障。
2.设计理念及思路
最早由日本研发的蛇形机器人,它的使用区域十分有限,并且因为其运动方式是爬行,所以遇到一些特殊环境,机器人就难以前行。而我国自主研发的双臂机器人“小龙虾”相对于蛇形机器人就更实用,优势在于它有两个“钳子”,可以搬动障碍物,并且有八条腿,可以向任意方向移动。但美中不足的是整个机器人呈“长条状”,机身翻了就不容易翻回。借鉴“小龙虾”两个“钳子”的优势和改善其“长条状”的缺陷,本团队研发了一款仿螃蟹水陆两栖救援机器人,螃蟹呈“正方形”,并具有两个“救援钳子”。具体思路如下:
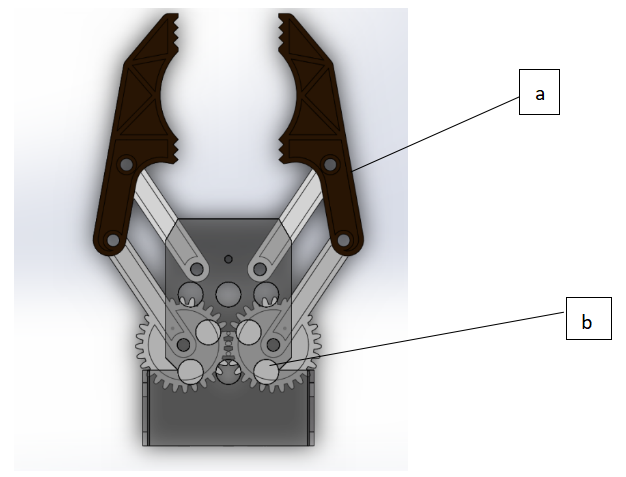
⑴仿螃蟹结构,六腿运行平稳,前端两夹子可抓夹物品,运输小型物件,如图2所示;
⑵基于螃蟹的运动机理,利用24个GX-Servo 高压舵机,GDW RS0708 微型舵机,红外测距传感器,AMG8833红外热像仪8×8传感器,无线GPS定位器,针孔摄像头,24路控制板,使机器人检测灾情,分析现场,实时选择最优路线以提高安全稳定性能;
⑶基于软件仿真,确定结构、电路、程序以及执行元件的可行性与可靠性;
⑷确定方案可行后,进行样机制作。
3.关键部位说明
3.1抓夹部分
抓夹部分是本款机器人主要功能部件之一。我们团队设计的抓夹部分一共由三个部分组成如图2所示。[a]是一个防滑夹,模仿螃蟹的钳子,上面有硅胶防滑垫,使在夹取搬运物品时增大摩檫力;[b]是动力传输装置,用来将舵机的扭力通过齿轮,传递到防滑夹[a]上。钳夹的舵机我们选用的是GDW RS0708 微型舵机,这款舵机,它具有小巧,扭力大,内部零件是由金属打造,这样可以使钳夹夹起更大更重的物品,从而能够应对不同的环境。
3.2运动执行部分
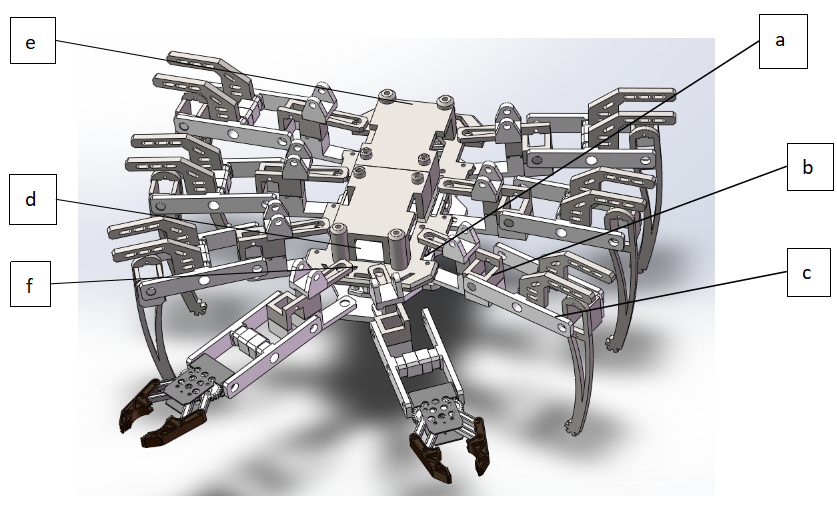
运动部分是本款机器人最重要的部分,他是通过GX-Servo 高压舵机在[a][b][c]这三个关节处运作,从而使机器能够像螃蟹一样爬行。再通过在 [f] [e] 两处都安装红外测距传感器和针孔摄像头,以实时测量机器人与周围环境的距离,还可以通过摄像头找到正确的路救援路线;[f] 处还会安装AMG8833红外热像仪8×8传感器,以便更加方便分析地形,并且还能测量幸存者是否体温正常;在 [d] 处安装无线GPS定位器,从而实时分享机器人的实时位置,在发现幸存者后,机器人会一直待在幸存者旁边,救援人员再通过定位,以最快的速度实施救援;[d] 处还可以放置一些救援物资,使幸存者可以在被发现之后通过救援物资,为救援队增加救援时间,在机器的内部放一些物资,还能使机器整体的重心更居机器的中心使机器整体更稳,在夹取物品时不会前翻。
3.3控制编程部分
在开发板上,我们选择使用的是众灵科技有限公司旗下的24路控制板,让其控制仿螃蟹水陆两栖救援机器人的各个关节能够准确无误的进行执行相关指令。其中PWM舵机接口和总线舵机接口用来控制仿螃蟹水陆两栖救援机器人的六足及钳子的各个关节。该开发板具有两种开发模式:
其一,在非编程模式下,短按执行按键一下(蜂鸣器响一声,编程灯慢闪)执行动作组一遍,该开发板具有两种开发模式,其一,在非编程模式下,短按执行按键一下(蜂鸣器响一声,编程灯慢闪)执行动作组一遍,长按执行按键(蜂鸣器响二声且不超过五秒,编程灯快闪)则循环执行动作组,在执行的过程中按下执行按键则暂停执行,再次按下时则继续执行,长按执行按键(超过五秒,蜂鸣器长响一声)则清除已存储的动作组;在编程模式下按下执行按键则退出编程模式。
其二,在非执行模式下, 长按编程按键(蜂鸣器响二声)则进入编程模式,此时编程灯亮起,在编程模式下按下编程按键则记录当前舵机状态一次,依次记录多组舵机状态时就可以形成一系列的动作;在编程模式下按下执行按键退出编程功能,编程灯灭掉。
后期,我们将采用开发板中的二次开发通讯接口,对仿螃蟹水陆两栖救援机器人进行自动化,增强红外线对外的感知,使其可以对障碍可以自动执行的转向或停止的功能。也对行走方式增加对向上或向下的阶梯或障碍的功能,这样能够让其在救援过程中行走于各种路况。将模仿螃蟹的游泳动作,对其设计一套在水下游泳的动作,使其可以进行水下救援。
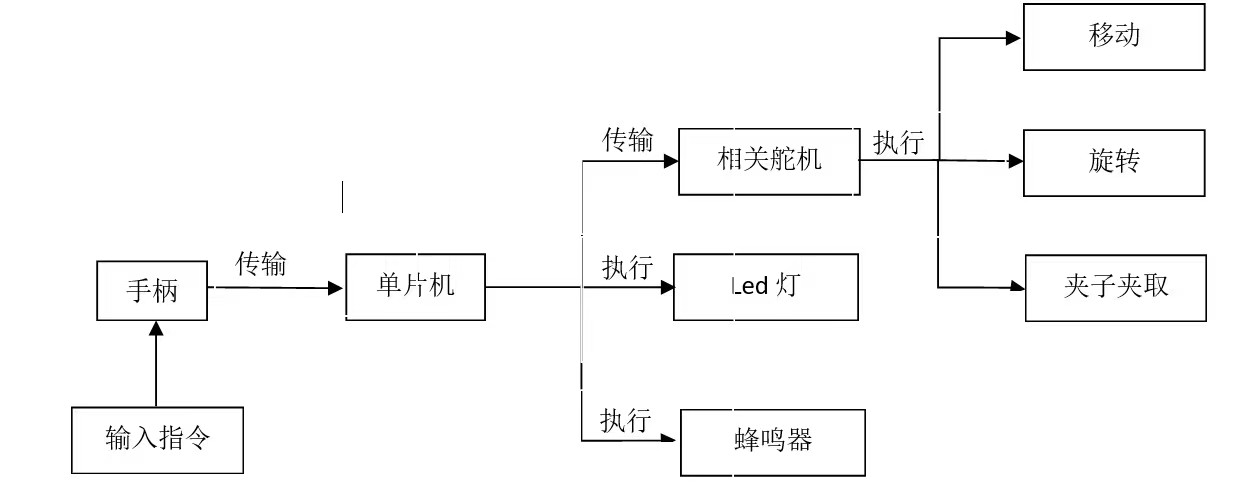
在机器人遇到单独解决不了的问题时,还可以采用手柄控制:手柄控制我们决定采用对手柄每个按钮进行命令输入,且每个按钮执行的是一整套动作,不会只是一条指令,这样机器人就能够得到完整的操作。该手柄具有以下特点:命令丰富性,该手柄具有红灯和绿灯两种形式,且灯亮起和熄灭又可以进行两条命令,所以一个按钮可以控制四条命令;执行方便性,因为只要记住每个按钮的动作是什么就可以,不需要一个个的去执行单个指令,能够大大的缓解了记忆的难度和机器人因操作不当死机的可能性;方式的多样性,该手柄采用独立的控制模块,并不采用蓝牙连接,不会手机小程序控制产生冲突,就能够各自独立的编写控制命令。控制四条命令;执行方便性,因为只要记住每个按钮的动作是什么就可以,不需要一个个的去执行单个指令,能够大大的缓解了记忆的难度和机器人因操作不当死机的可能性;方式的多样性,该手柄采用独立的控制模块,并不采用蓝牙连接,不会手机小程序控制产生冲突,就能够各自独立的编写控制命令。用手柄控制仿螃蟹两栖救援机器人只需要将写好的指令整理分类好,然后进行手柄配置,设置手柄每个按钮的具体分类好的完整一个动作命令即可,如图4所示。
与现有救援机器人相比,仿螃蟹水陆两栖救援机器人主要具有以下创新点和特色:
⑴在结构上,重心平稳、结构新颖。采用“六腿两钳”设计,整个外型呈现正方形,实现重心平稳;同时“蟹壳”不仅可以放补给,而且前半部分还可存放Scorkl等潜水装置,后半部分则可以安放高压存氧容器,提供氧气补给,结构设计新颖。
⑵按防水标准设计,在水下也能正常运行。机器人前方的摄像头、热感应器、和机器人内部的GPS定位器联合使用,实现水中军事侦查。因此,它不仅适合水陆两栖救援,而且可用于军事侦察。

.png?x-oss-process=image/resize,w_200)







