引言:
随着城镇化进程的增加,高层建筑物不断增加,楼梯面积不断扩大,而楼梯的清理往往需要人工进行,需要消耗更多的人力物力。我们团队发明的产品在以往传统扫地机器人的基础上采用三段式结构,利用三段升降结构进行楼梯的爬升,对难以清理的楼梯道进行全方位清洁。
扫地机器人是以减轻清洁负担、提高生活质量为目的,在家庭环境内工作,扫地机器人的智能体现为具备一定自主行动能力、自主判断能力、自主学习能力,能够根据路径导航完成设定的清洁任务。扫地机器人因其简单的操作功能和便利性,其已经成为现代家庭生活中的常用家电用品。2019年我国共享经济市场营业额约为32 828亿,同比增长了11.6%;2020年我国共享经济市场交易规模约为33 773亿元,这一前提下,三箱式楼梯清理机器人有着广阔的市场前景。
在未来,传统的地面扫地机器人将会被智能化可自主爬楼扫地机器人取代。三箱式楼梯扫地机器人是普通平面式扫地机器人的转型升级产品,在其原有功能的基础上,实现了楼梯攀爬和清理功能。自党的十八大以来,“绿色、共享、发展、创新”的新型经济理念已经成为主流,三箱式楼梯清理机器人恰恰符合这一主流观念,是国家鼓励发展的智能家居产业之一。如今,高端智能化的扫地机器人已经不仅仅是一个扫地拖地的工具,这种实用性、装饰性、高端性兼具的家居智能产品。不仅如此,中国在扫地机器人领域还有着巨大前景和机遇。首先,对于楼梯清理机器人来说,中国市场处于一中低渗透率和高需求并存的状态。相比西方发达国家的市场,中国扫地机器人市场的渗透率有待提升。持此之外,中国高校,医疗,城镇化的迅速发展都给楼梯清理机器人提供了巨大的市场需求。而在后疫情时代的大背景下,清理清洁消毒等工作急需自动化的机器人来代替人工。楼梯清理机器人拥有着庞大的市场和广泛的应用场景,三箱式楼梯清理机器人在未来会是一种趋势。
三箱式楼梯清理机器人总体方案设计:
1.工作原理
产品采用三段式结构,利用三段升降结构进行楼梯的爬升。前部安装红外线传感器,扫地机器人在遇到楼梯时发出信号,通过传感器测量楼梯距离,控制第一部分结构使机身抬升,通过麦克纳姆轮控制左右移动进行清洁。再通过前后移动和第二三部分的抬升完成一阶楼梯的爬升,继而进行楼梯道的清扫工作。内部采用吸尘装置和自动洒水擦干功能对楼梯道进行全面清洁。机器人底部安装红外线传感器,当机器人悬空时候发出预警,控制机体进行移动,防止掉落。
2.楼梯扫地机器人控制系统设计
2.1整体模块化设计方案
三箱式楼梯清理机器人采用三箱式结构主体,由0.5mm的PC板和0.1mm的直角铝组合而成。长:30cm 宽:20cm 高:50cm。中间轿箱包含控制模块,两边轿箱包含清理模块。中间由滑轨连接,运行时由电机带动齿轮齿轮带动滑轨使第一节轿厢升起,后两节轿箱进行清理作业。再次运行使中间一节轿厢抬升,前两节轿厢进行清理作业。通过TB6600电机驱动器的控制由42步进电机带动齿轮和滑轨进行轿厢的上升和下降,由550马达带动底部麦克纳姆轮进行前后移动和左右的横移。通过Arduino UNO R3开发板的控制,产品的每节轿箱的升降和麦克纳姆轮的运动,达到楼梯爬升的效果。
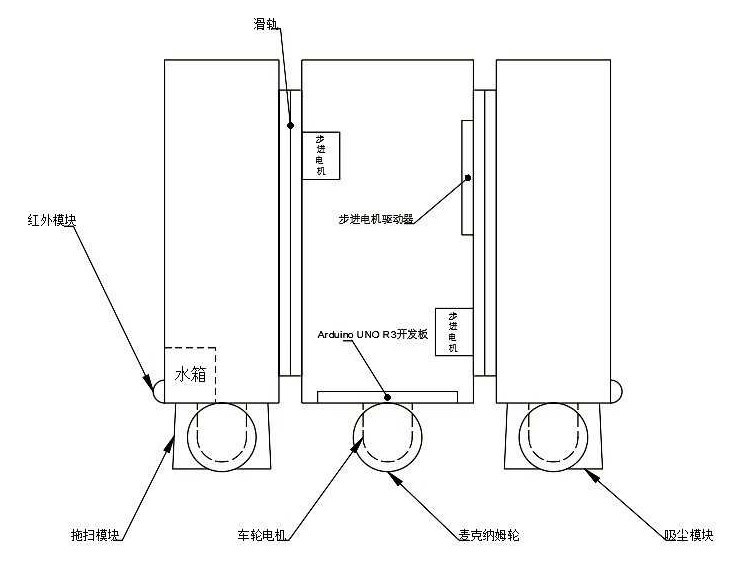
图1 清理机器人模块图
2.2楼梯爬升模块
产品采用三箱式的结构进行楼梯攀爬。三箱式楼梯清理机器人的导轨升降装置采用的是步进电机加直线滑轨导轨构成的。滑轨通过齿条和齿轮与箱体进行联接通过步进电机驱动器进行控制和输入命令来控制箱体的升降。通过三部分的抬升和降落以及清理机器人和前进和后退进行配合,进而实现楼梯攀爬。
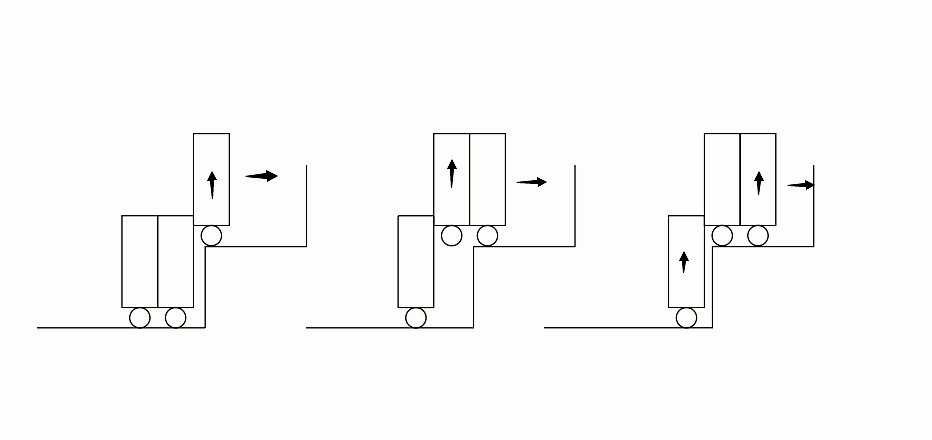 图2 机器人爬楼示意图
图2 机器人爬楼示意图2.3清理清洁模块
三箱式楼梯清理机器人的清理清洁模块主要分为一号箱的扫地吸尘系统和三号箱的拖地消毒系统。 扫地吸尘系统:扫地机器人通过边刷将垃圾和灰尘聚集到扫地机器人中心,然后通过内置电机高速旋转,在主机内形成真空,利用产生的高速气流将垃圾从吸口吸入。吸进扫地机器人的垃圾堆积在布袋机内,经过滤网净化的空气体从扫地机排出,同时冷却扫地机器人的电机。 拖地消毒系统:扫地机器人通过底部滚刷实现拖地,通过底部雾化喷头实现消毒水的喷洒。
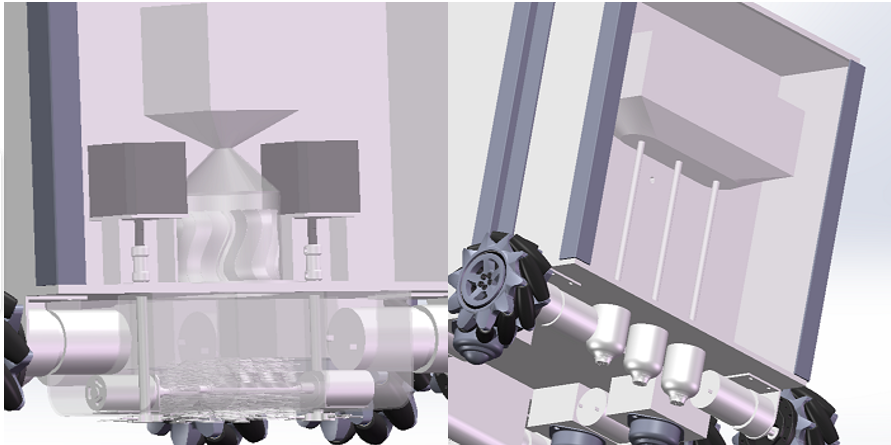 图3 吸尘消毒系统三维图
图3 吸尘消毒系统三维图
2.4红外线与超声波感应装置模块
三箱式楼梯清理机器人采用红外线与超声波装置分布在箱体四周通过感应来限制机器的工作轨迹以实现机器的自动化。通过红外感应,扫描周围环境,在平面路段可规划路线防止撞墙。超声波传感器通过传感器对前方发出超声波,当遇到障碍物时,通过介质表面进行发射,传感器将捕捉并接收到一部分被放射回来的超声波,并转化为电信号。通过红外和超声波的共同作用实现线路规划和避障。
2.5控制模块
三箱式楼梯清理机器人采用Arduino UNO R3开发板和TB6600步进电机驱动器,通过程序编写对产品的移动模块、升降模块、红外感应模块和清洁模块进行控制,管理本产品各部分的协调合作,共同实现楼梯清理机器人的的自动化和智能化运行。
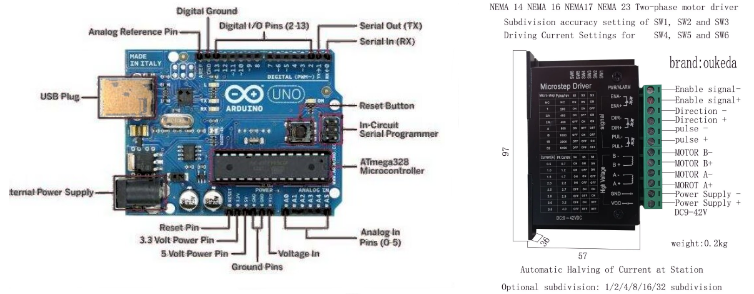 图4 Arduino UNO R3开发板和TB6600步进电机驱动器
图4 Arduino UNO R3开发板和TB6600步进电机驱动器2.6运动模块麦克纳姆轮
三箱式楼梯清理机器人采用麦克纳姆轮实现平面运动(旋转,平移,直线移动,转向移动)。运动学原理:麦克纳姆轮因其特有的构造而具有独特的运动方式,也就是实现所谓的“全向移动”。安装麦克纳姆轮可以实现三厢式扫地机器人的在楼梯的横向移动。
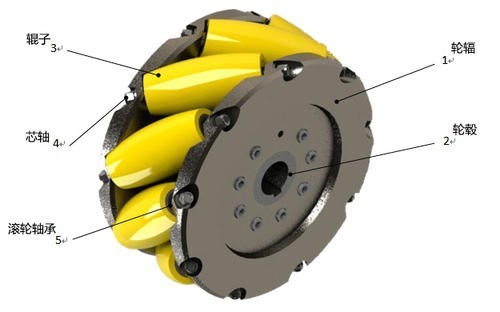 图5 麦克纳姆轮
图5 麦克纳姆轮结语:
本文针对现有扫地机器人所存在问题,对基于导轨式升降机构的三箱式楼梯扫地机器人进行研究,完成了三箱式楼梯扫地机器人整体模块化设计方案,包括楼梯爬升模块、清理清洁模块、红外线感应装置模块、控制模块和麦克纳姆轮运动模块。该机器人的高性价比和较为完善的基础功能符合复合式楼房用户以及小区物业等行业对代替人工进行楼道清理工作的需求,并且有足够的扩展能力,能够适应市场发展,为用户节省更多时间。旨在服务基层,能为环境保护节省人力和物力。

_UK.png?x-oss-process=image/resize,w_200)








