随着四足机器人的发展,由于研究目的的不同,四足机器人的结构设计及驱动执行器选择呈现多样化。但目前四足机器人领域的研究方向正逐渐朝着轻量化、模块化、智能化和高自适应性方向发展。具备以上特点的四足机器人更容易被应用于各种领域,比如勘测、救援、排爆等等,国内外也涌现出一批优秀的四足机器人。
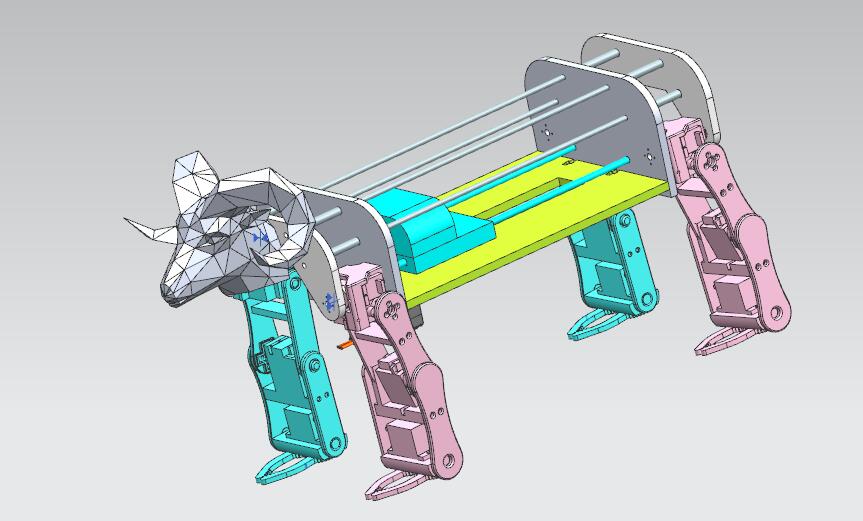
基于本次研究,以于陡峭山地地形中具有良好环境交互运动特性的典型动物-岩羊作为仿生对象,通过解析其身体和腿部等部位的特殊生理结构、材料及机构特征,将生物体形貌、局部结构特征和整体运动模式等因素有机地结合起来,研发一款仿生岩羊四足机器人。
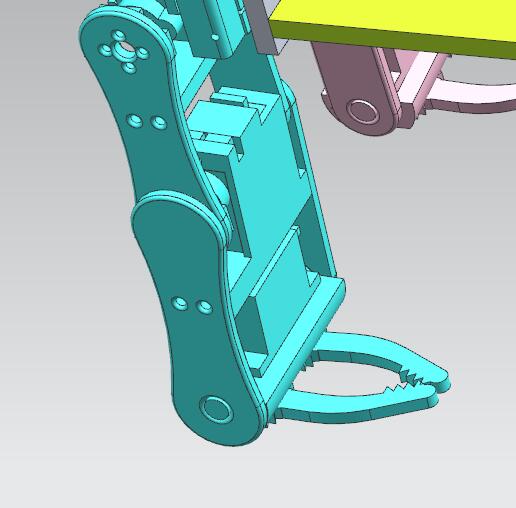
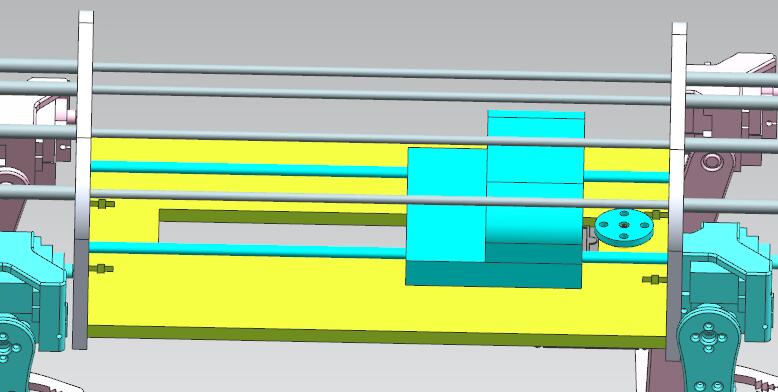
本装置主要包括直线滑台装置实现整体重心偏移、仿生岩羊蹄部装置和腿部三关节机构三大功能模块。各部分机构相互配合实现岩羊的重心偏移、蹄部自由闭合以及限位稳定躯干等岩羊特征性功能。并基于设计的仿生岩羊蹄部结构进行了D-H运动学建模,对模型进行正运动学的求解,确定了仿生岩羊蹄足尖运动空间。以及通过计算得出了足端运动空间以及体平面与地面夹角保持不变,从而能使仿生岩羊在斜面上保持平衡,从而确保了仿生岩羊的安全性。
控制系统分为主控部分和辅助控制部分。主控部分主要控制舵机的启动以及速度,辅助控制部分可实现电池电量的监控。
关键词:仿生机械;岩羊攀岩机构;运动学建模;仿生羊蹄;
研究意义
通过大量的文件检索、走访调查与问卷分析,本项目组充分研究了现有的仿岩羊机器人的结构,其仿羊蹄无法实现斜面行走,大部分都是依靠羊蹄特性实现爬坡,无法完全实现飞檐走壁,因此本项目组决定设计一款功能完全的仿岩羊,可以真正意义上的斜面行走,从而有效的加强在任意恶劣的地势之下,可以实现一种超越。
系统总体设计
系统总体设计决定着整个研究工作的成败与研究水平的高低,其核心在于将功能与结构合理组成、性能与效果协调统一,以此引导仿生岩羊机器人的设计思想、研究方法、功能原理、结构特点、设计技巧、技术途径等方面的创新,掌握整体,至顶而下,逐步细化,以科学的方法进行设计研究。
机械结构设计
机械结构设计是仿生岩羊研究的核心,研究满足岩羊的整体攀岩的运动的机械结构是研究的重点。该系统机械结构部分主要包括:岩羊两瓣蹄掌的合拢装置、岩羊攀爬时的重心调整装置、岩羊蹄掌的嵌入装置、躯干内部的镂空储存设置、腿部支撑装置。
控制系统设计
控制系统设计是仿生岩羊机器人的重要内容,其中控制模块和编程驱动模块是该部分研究的重点。本系统采用主控制和辅助控制结合模块化的设计理念,主控制部分选用STM32F103C8T6控制器为核心构成最小系统,包括电源模块、角度传感器、复位电路、JLNK接口电路、扩展接口电路等,实现对舵机的启动、正反转控制,从而控制仿生岩羊的行走。