基于智能系统的高压电线除冰清障机器人设计
随着我国改革开放的不断开展,我国经济建设和技术应用都得到了高速稳定的发展,机器人已成为制造加工行业必不可少的关键设备,机器人可以分为工业机器人和特种机器人两大类,工业机器人通常应用于制造加工行业,实现工业自动化,多为关节机器人和多自由度机器手;而特种机器人则被广泛应用于各行各业,几乎遍布除工业外的其他领域,包括服务机器人、军用机器人、农业机器人等等, 除冰机器人作为特种机器人的一种,它的出现不但代替了电力工人的现场实际作业,提高高压线除冰的工作效率,而且利用除冰机器人可以大量节省人力成本,这就使得除冰机器人的研究工作更加有现实意义。
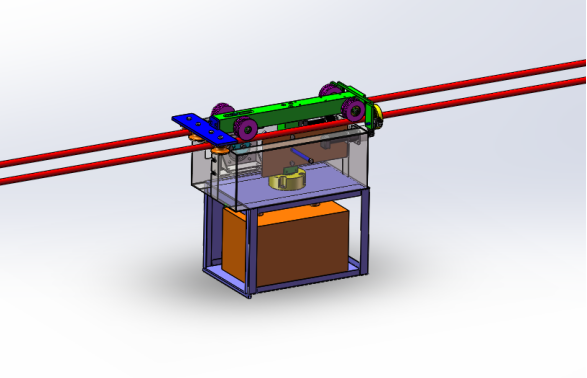
除冰机器人相比其他特种机器人,结构更加简单,使用起来更加方便。其整体结构分为行走机构和除冰机构两大块,行走机构的方式多种多样,有腿式行走机构,轮式行走机构,选择何种行走方式决定了除冰机器人的工作效率和质量。本篇论文中提出了一种结构巧妙、机动性好、稳定性能高的机械除冰机器人设计方案,本方案对除冰机器人技术进行深入分析研究,其工作原理是:利用行走电动机驱动行走轮转动从而带动整个除冰机器人向前行走,利用除冰电动机带动除冰刀转动实现除冰机器人在高压电线上自动巡线除冰的目的。除冰机器人作为一种新型的特种机器人,对此进一步的研究也是不能忽视的。
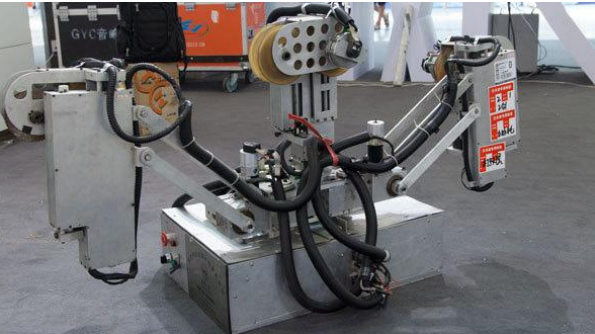
欧美等国家在除冰机器人的技术研究方面一直处于世界的前端,他们单独设立有专门的除冰机器人技术研究小组,且都在努力将除冰机器人的技术应用于不同气候环境下都能够正常作业。目前国外的除冰机器人研发已经取得了突破性的进展,他们成功将该除冰机器人应用到高压输送线路巡线除冰的实际作业中,还有部分除冰机器人甚至可以能够对高压线路进行简单维护工作,比如: 东京电力公司的OPGW巡线移动机器人,Hibot Expliner机器人,加拿大魁北克水电研究院的HQLineROVer遥控小车, LineROVer除冰机器人,LineScout除冰机器人等,其中最典型的是: 东京电力公司的OPGW巡线移动机器人。
东京电力公司在日本的除冰机器人研究领域处于领先地位,其研发的OPGW巡线移动机器人被日本电力行业视为轻型无人作业、自动除冰维护用机动平台的模板。该机器人利用两个行走轮和两个导向轮沿着高压输送线行走,能避开防震锤、螺旋减震器等高压线路上的障碍物。遇到高压线塔时机器人本体采用仿人攀爬的结构原理,先展开弧形手臂,手臂的首端吊住高压线塔两侧的地线,作为着力支撑点,然后整个机器人顺着高压地线滑到线塔的另一端;待机器人导向轮夹紧高压线塔另一端的地线后,将弧形手臂折叠收起,重复上述动作过程,最终实现自动行走的目的。OPGW巡线移动机器人本体顶部还安装有8个摄像头用于实时拍摄高压输送线路上现场情况,辅助完成机器人的巡线检测任务,并通过电晕效应的原理去除高压输送线路上的覆冰。该机器人还可以通过前后导向轮交叉换向实现自动避障的功能。
目前国内对除冰机器人的技术研究仍然处于初始阶段,对除冰机器人的定位传感器、位置导航、运动控制以及除冰结构设计等关键层面的研究还远远落后于其他欧美国家。不过现在许多国内研究机构也开始努力开展对除冰机器人的研究工作,从最基础的行走机械结构设计、除冰方式及运动控制入手。由于除冰机器人在机动性、越障方式等方面与其他特种机器人有很大不同,因此国内在除冰机器人技术研发这条路上还有很长的路程要走。
(1)本设计中的机械除冰机器人主要应用于不同气候环境下的电力除冰和维护作业,可以大量节省人力财力,提高高压输送线路覆冰的除冰效率。
(2)本设计之前综合考虑,该机械除冰机器人应该具有以下功能:产品制造成本低,质量安全稳定,使用时间长,结构简捷,除冰效率高,方便搬运移动;
(3)本设计从机械除冰机器人行走机构设计和机械除冰机构设计两方面着手进行详细的设计分析及计算阐述。









