|
(一) 研发背景
随着对能源需求量的增加和开采强度的不断加大,浅部资源日益减少,国内外矿井都相继进入深部资源开采状态,在矿井井下进行钻孔作业时,随着资源开采不断走向深部,岩层温度随开采深度的增加逐步上升,巷道变形、岩爆、塌方、瓦斯爆炸、冒顶垮塌、透水等事故时有发生,严重威胁着广大从业人员的生命财产安全,制约着矿井安全高效的发展。由此,亟需加大对深部开采矿井围岩状态的监测、预测预报和预警力度,切实保护从业人员的安全、解决矿石开采行业的发展难题,促进矿井安全的发展。
在井下钻孔作业中,勘探机器人是不可缺少的媒介和探测工具。应用勘探机器人可代替人工迅速进行多参量探测,对井下环境信息进行采集和检测,并实时传送到地面,为作业决策及时提供现场信息。矿井勘探机器人作为井下的特种机器人,其研究进展的快慢、功能的完善和性能的优劣,直接关系到矿井井下钻孔技术的提高。
基于此,团队成员设计了一种集探井时定向规划移动路线、精确定位、传感探测、影像监控、集中控制于一体的智能多参量矿井环境探测机器人。通过本机器人可实现对井下巷道大环境及钻孔围岩的环境探测,可及时发现和辨识隐蔽致灾因素,以便于制定相应的预防措施,杜绝矿井重大安全事故的发生,实现矿井安全稳定生产。再之通过对井下巷道大环境及钻孔围岩的检测监测,可知晓围岩内部情况,为巷道设计和施工、矿体开采提供可靠的资料。而且,机器人可在狭窄的钻孔内无障碍运行,获得钻孔内围岩的实时图像、温度数据、为获得围岩松动圈、岩爆预测预报预警等提供依据。
多参量矿井环境探测机器人的广泛应用可极大提高矿井作业的效率和人工作业的安全性,为实现无人化的矿井作业提供了帮助,促进了矿井产业的智能化、高效化发展。
(二) 结构说明
在结构性能方面,该产品大部分部件采用碳纤维和其他先进材料,防水性强,强度高,可有效避免井下岩石掉落砸坏机身。在运行稳定方面,四个轮子可根据地形自由改变角度,若因意外情况出现翻车事故也能自动将车身调正,机身可有效适应钻孔尺寸。在信号反馈方面,该产品在井下信号薄弱的条件下也能精确定位、准确测量,极大提高井下勘测精度。智能多参量矿井环境探测机器人性能稳定,操纵方便,兼顾人工远程控制和全程自动化运转的优势,该产品的广泛应用可在实现智慧无人化矿井的同时,进一步提高矿井围岩监测、预测及预报的精度和可靠性,为提高矿井作业效率及降低安全隐患带来了福音,进一步推动了社会生产的发展。
1.移动机构部分
研究背景:早前,国内曾有人利用抽风机抽走底盘下方空气的原理实现让小机器人吸附到墙上,简单理解即家庭中的吸附式挂钩。机器人的四个轮子角度可以自由变化,以适应崎岖的围岩表面,可以有目的得规划行进路径,实现攀爬、翻越等功能。
机构介绍:该智能多参量矿井环境探测机器人的移动机构部分既负责了该智能多参量矿井环境探测机器人的定向移动,又作为整个构造的基架承载其他部分。使其像壁虎一样可以攀爬过竖直的墙壁,具有良好的攀爬性能,甚至可以使机器人在垂直钻孔内行进。机器人底盘用碳纤维制造,最大限度地降低了重量,轮子和一些零部件也使用了3D打印技术制作。机器人装有两个推进器,控制马达可以分别独立控制推进器的转动速度,控制好两个推进器(类似螺旋桨)输出合适的推力。从物理的角度讲,机器人的吸附力应得益于中间的两个推进器产生的助推力。螺旋桨和轮子的转动受电动机的控制,在水平面运动时,机器人后面支柱和地面垂直,提供足够的水平推力,将机器人带入各种地形。当对斜面或垂直面进行攀爬时,前面的推进器推进并且向上倾斜,将机器人的前端推上斜面或垂直面。同时,后面的支柱持续推进后端向前,直到它也上墙为止。
预期成果:基于以上特性,该智能多参量矿井环境探测机器人就能在矿井和钻孔四壁上不间断地自由行走,甚至可以“倒挂行进”。
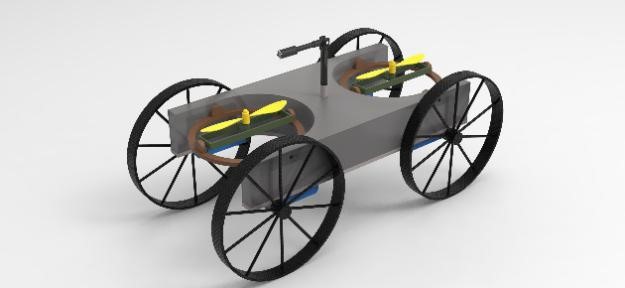
图1 移动机构部分3D建模
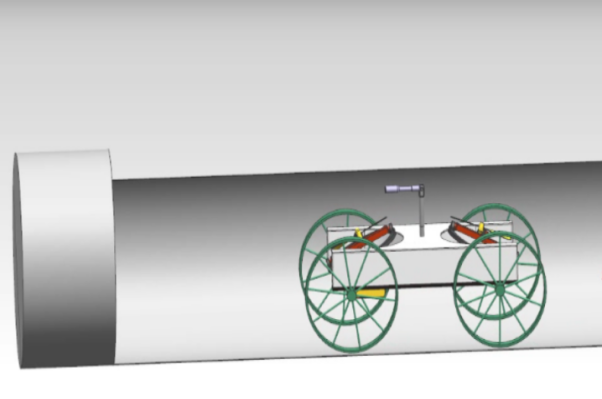
图2 机器人在钻孔中自由行进模拟
2.定位系统
研究背景:目前大多数陆地机器人都装备有提供全局位置信息并且没有累积误差的GPS定位系统,但是由于探测的实际环境为井下钻孔,探测机器人无法接收到稳定的GPS定位信号,导致其出现定位延迟或中断等问题。若探测机器人仅采用内置码盘和电子罗盘的航迹推算方法对其自身位置和姿态进行估算,机器人在行走一段路程后,由航位推算得到的坐标位置和实际的坐标位置间会有一定的误差,并且随着时间的累积误差会越来越大。产生这种累积误差的原因有很多种,例如轮子与地面产生滑动偏移,导致码盘计数不准确。因此,在没有外部的定位传感器提供导航定位信息的辅助下,探测机器人基于自带的码盘和电子罗盘的航迹推算定位方法并不能满足矿井探测在定位精度和实时性方面的要求。
系统介绍:为降低钻孔内复杂环境对探测机器人的影响,同时应对矿井井下信号弱、GPS信号不易传达、温度压力变化、地形崎岖等不可预测的特点,该智能多参量矿井环境探测机器人采用动态定位的方式进行位置锁定。因此,该智能多参量矿井环境探测机器人在惯性导航定位的基础上增加陀螺仪和里程仪,提出一种多传感器的组合导航定位系统,降低环境因素对探测机器人产生的姿态误差和定位误差,同时利用视觉传感器获取目标图像,经过数字图像处理及特征点提取,得到目标的图像坐标,进而映射出目标的实际位置。由于数字摄像机所提供的数字信号可以方便直接地在计算机上建立模型空间目标特征点与图像特征点之间的对应投影变换关系,进而能够快速准确地确定目标特征点位置,对惯性导航系统产生的误差进行修正。
预期成果:使用此定位方法为探测机器人在钻孔环境下提供高精度和无累积误差的实时定位信息,产生的定位误差最大约为8.5mm,即使在图像扭曲畸变比较严重的边界区域也一样有非常高的定位精度,满足探测机器人在严酷环境下的定位需求。
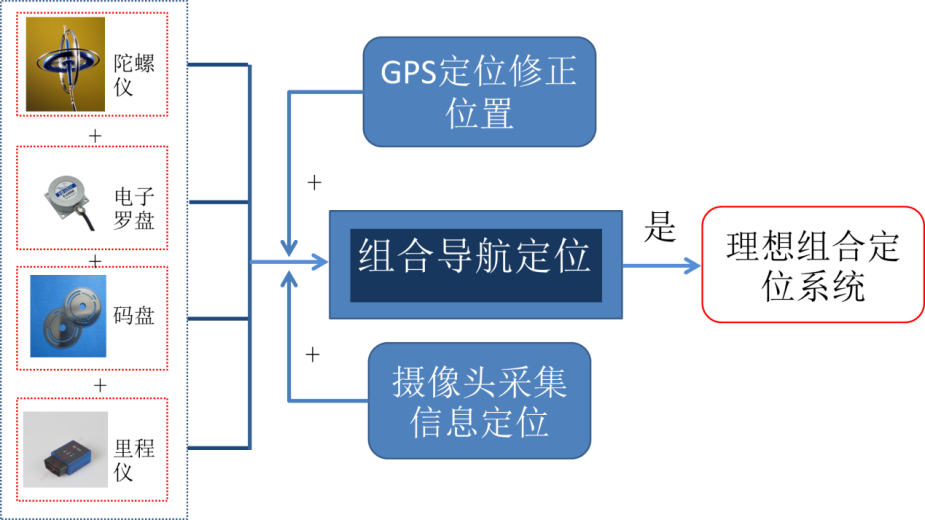
图3 组合导航定位系统
3.测量系统
(1)围岩变形测量
该智能多参量矿井环境探测机器人采用激光或超声波测距传感器,测量进行时,传感器探头发出超声波,超声波在井下钻孔中传播,其传播方向或特征因为钻孔四壁环境而发生改变,然后反弹到探头。传感器将反射波换成电信号,该信号将被仪器数码化,数码化反射波被分析后便得反射波所花的具体时间,从而得出钻孔内部的各类精确参数。
由于超声波的波长小,发射的定向性高,所以能精确地测定超声波传播速度。通过测量频率超过16-20kHz的弹性波在岩体中的传播速度,进而可以计算出相关参数。除了可以测量岩石动弹性模量、围岩的松动范围、应力的变化等有关参数外,亦可用来测定围岩破裂情况、松动范围等。
预期成果:使用次检测方法降低成本、加快速度,且激光或超声波测距传感器可适应该机器人轻小的体积和重量,测量所得数据十分精确,可以适应严酷的井下作业环境。
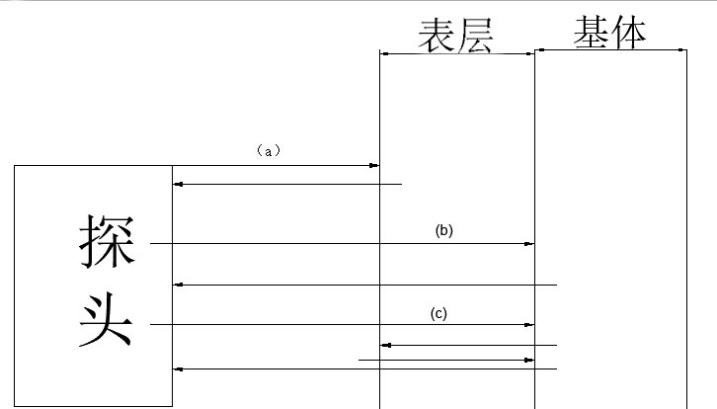
图4 超声波测量原理
(2)温度测量
钻孔测温可了解围岩温度变化,围岩温度高低能间接反映钻孔内部情况,一些无法直接通过超声波检测的参数也可以被推算出来。
智能多参量矿井环境探测机器人的测温部分采用非接触式温度传感器,它的敏感元件与被测对象互不接触,又称非接触式测温仪表。这种仪表可用来测量运动物体、小目标和热容量小或温度变化迅速(瞬变)对象的表面温度,也可用于测量温度场的温度分布。

图5 温度传感器外观
4.影像系统
为使操作人员能观察到矿井四周环境,使机器人进入矿井后找到钻孔,并能更加具体地观察到矿井井下钻孔内的围岩情况,智能多参量矿井环境探测机器人安装了高清微型摄像头,兼有可自动调节的补光设备确保成像清晰。摄像头可通过控制调节焦距,既能使操作人员观察一定范围内的旷阔矿井空间,又能微距观察微小钻孔内部环境。

图6高清微型摄像头外观

图7高清微型摄像头外观
5.控制系统
机器人的移动机构部分、定位系统、测量系统以及形象系统中的摄像头均受8051单片机控制。8051 单片机3D建模图如图8所示。8051单片机主要由运算器、控制器、存储器(ROM 及RAM)、数据总线和I/O 接口组成,和一般微处理器相比,8051 增加了四个8 位I/O 口、一个串行口、4KB ROM、128BRAM、很多工作寄存器及特殊功能寄存器(SFR),所以单片机具有比微处理器更强大的控制功能,经过测试,能够在生产过程中采用,并具有较高的使用寿命和控制精度。
图8控制系统8051单片机
(三) 功能与应用前景
多参量矿井环境勘探机器人的设计理念是在节约人力物力的前提下,获得更加精确的检测结果,以提高矿产资源的开采效率。在行业需求层面,通过对井下巷道大环境及钻孔围岩的检测监测,可知晓围岩内部情况,为巷道设计和施工、矿体开采提供可靠的资料,有效避免对不利工况环境的开采,极大地提高了矿井作业的效率,为实现无人化的矿井作业提供了帮助,促进了矿井产业的智能化高效化发展。在行业安全层面,针对某些废弃、年久失修、内部环境恶劣的矿井,为保证人身安全,在将该产品送入矿井井下后,矿井技术人员可将检测任务交由智能多参量矿井环境探测机器人,在地面上仅用一台普通的计算机就可以操控机器人完成检测任务。该产品可实现对井下巷道大环境及钻孔围岩的环境探测,可及时发现和辨识隐蔽致灾因素,以便于制定相应的预防措施,进而杜绝矿井重大安全事故的发生。在技术革新层面,该多参量矿井环境勘探机器人集单片机、传感器、嵌入式系统应用于一身,集合了计算机应用技术、单片机及嵌入式操作系统、无线通讯网络知识。可在判断矿井潜在危险或发现已有危险后,第一时间内将信息传输到指挥总部。将智能技术有效应用于实践,由此,该产品对智能技术的应用,发展与革新提供了宝贵的参考价值。
|













