一、项目实施的目的、意义
(一)项目背景
习近平总书记在党的二十大报告中指出,加快实现高水平科技自立自强。以国家战略需求为导向,集聚力量进行原创性引领性科技攻关,坚决打赢关键核心技术攻坚战。坚持创新在我国现代化建设全局中的核心地位,加快实现高水平科技自立自强,加快建设科技强国。并对完善科技创新体系、加快实施创新驱动发展战略等作专门部署。这是以习近平同志为核心的党中央把握国际国内大势、有效应对风险挑战、确保实现新时代新征程党的历史使命作出的重大战略抉择,充分体现了习近平总书记高瞻远瞩、统揽全局的战略思想及对科技创新的战略擘画,为新时代科技发展指明了方向。
在现代科技发展水平不断提高和产业改革持续深化的情况下,新型信息技术的应用促进了智能制造模式的兴起和发展,同时彻底突破了传统机械制造方式的束缚,而智能制造模式在现代机械制造领域中的应用越发广泛。机械臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
科技创新是高质量发展的核心驱动力。随着工业机器人的市场需求越来越大,各种类型的服务机器人层出不穷,而机械臂作为一线生产的服务型机器人以高效优质的生产优势被越来越多的企业所应用。目前工业中有许多场景需要用机械臂代替人工进行一些繁琐的工作,如物料的分拣,缺陷工件的检测以及排除,部件拼装等等。
1.我国智能机械手臂的发展现状
和国外成熟的产品相比,我国的相关研究比较少,在20世纪80年代,国家大力支持工业机器人的科技攻关,经过近数年的不断探索,我国在机器人的相关研究中积累了比较成熟的经验,可以将研究出来的机器人用在不同领域发挥重要作用。现在很多企业都能够用上国产的喷漆机器人、焊接机器人,尤其是在我国的大型汽车制造企业生产线上。我国现在机器人研发企业众多,总数超过200家,很多企业单位都具有自己的研发制造特色,比如哈尔滨的焊接研究所、昆明的船舶公司、一汽集团的涂装技术开发中心等等,除了这些有研发实力的企业,很多有实力的科研院所和大学都有机器人方面的研究进展。
2.图像识别技术
图像识别技术是人工智能的一个重要领域,它是指对图像进行对象识别,以识别不同模式的目标和对象的技术,本项目采用图像识别技术,通过调用openMV库函数准确校准色块的位置,通过可视化插件,调节LAB参数,使目标颜色在画面中成为白色,记录每个色块颜色的LAB值范围,摄像头即可根据探测到画面中的LAB值,将设定范围内的像素点列为色块所在的区域。如图1所示。

图1
3.机械臂控制
机械臂采用三自由度机械臂,主体部分由三个20kg舵机驱动,头部安装机械爪,用来抓取物料。这种机械机构较为灵活,操作范围大,且控制方便。只需对舵机进行角度控制即可。
测距扩展板使用了TOF测距芯片,它通过测量“飞行时间”,或者光发射回芯片的时间来测量距离。与测量发射超声波相比,TOF测距的视野非常窄,更精准。与测量反射红外光强度相比,TOF测距更精确,而且测量红外光强度不能判断是很近还是很远。距离传感器安装于机械臂头部,用于测量爪子与色块距离。具体实物如图2所示:
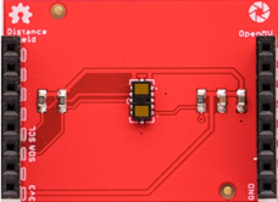
图2
4.PID算法
PID(proportion integration differentiation)其实就是指比例,积分,微分控制。PID控制应该算是应用非常广泛的控制算法了。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。总的来说,当得到系统的输出后,将输出经过比例,积分,微分3种运算方式,叠加到输入中,从而控制系统的行为。 PID算法的过程如图3所示:
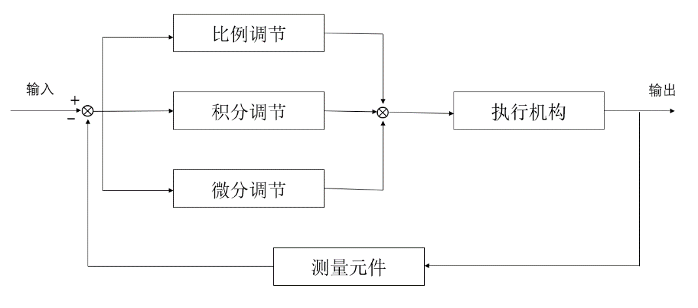
图3
(二)研究目的
党的二十大报告提出:“加快发展数字经济,促进数字经济和实体经济深度融合”。这是抓住世界科技革命和产业变革机遇、抢占未来发展制高点的客观要求和有力举措。目前的图像识别技术是作为一个工具来帮助我们与外部世界进行交互,只为我们自身的视觉提供了一个辅助作用,所有的行动还需我们自己完成。而当机器真正具有了视觉之后,它们完全有可能代替我们去完成这些行动。目前的图像识别应用就像是盲人的导盲犬,在盲人行动时为其指引方向;而未来的图像识别技术将会同其他人工智能技术融合在一起成为盲人的全职管家,不需要盲人进行任何行动,而是由这个管家帮助其完成所有事情。举个例子,如果图像识别是一个工具,就如同我们在驾驶汽车时佩戴眼镜,它将外部信息进行分析后传递给我们,我们再依据这些信息做出行驶决策;而如果将图像识别利用在机器视觉和人工智能上,这就如同的无人驾驶汽车,机器不仅可以对外部信息进行获取和分析,还全权负责所有的行驶活动。
(三)项目意义
深入学习贯彻党的二十大精神,在新时代新征程自觉肩负起科技创新使命责任,加快推进高水平科技自立自强的奋进力量。机器视觉比人类的生理视觉更具优势,它更加准确、客观和稳定。人类视觉有着天然的局限,我们看起来能立刻且毫无费力的感知世界,而且似乎也能详细生动的感知整个视觉场景,但这只是一个错觉,只有投射到眼球中心的视觉场景的中间部分,我们才能详细而色彩鲜明的看清楚。偏离中间大约10度的位置,神经细胞更加分散并且智能探知光和阴影。也就是说,在我们视觉世界的边缘是无色、模糊的。因此,我们才会存在“变化盲视”,才会在经历着多样事物发生时,仅仅关注其中一样,而忽视了其他样事物的发生,而且不知道它们的发生。而机器在这方面就有着更多的优势,它们能够发现和记录视力所及范围内发生的所有事情。拿应用最广的视频监控来说,传统监控需要有人在电视墙前时刻保持高度警惕,然后再通过自己对视频的判断来得出结论,但这往往会因为人的疲劳、视觉局限和注意力分散等原因影响监控效果。但有了成熟的图像识别技术之后,再加以人工智能的支持,计算机就可以自行对视频进行分析和判断,发现异常情况直接报警,带来了更高的效率和准确度;在反恐领域,借助机器的人脸识别技术也要远远优于人的主观判断。
二、项目研究内容和拟解决的关键问题
(一)研究内容
本项目主要研究具有图像识别的色块自动识别拣取得机械臂装置,主要由一个Openmv摄像头和一个机械臂组成,机械臂控制采用PID控制算法,机械臂采用三自由度机械臂,主体部分由三个20kg驼级驱动,实现对不同色块的分拣。
(二)拟解决的关键问题
(1)PID参数调节
由于自动控制系统被控对象的千差万别,PID参数也随之发生变化,以满足系统性能的需求,这就给使用者带来相当的麻烦,特别是初学者,调试PID参数成为一大难题。
(2)LAB参数的设置
如果想要抓取目标色块的话,需要对大量的数据进行训练,记录每个色块颜色的LAB值的范围,摄像头即可根据探测到的画面中的LAB值在设定范围的像素点列为色块所在的位置。
(3)结果可视化的实现
在确定了控制算法及参数设置之后,需要对结果进行可视化,此时需要使用Openmv自带的IDE界面,展现抓取何种颜色色块的文字信息。








