研究目的和意义:
随着科技的进步和生活节奏的加快,人们对家庭清洁的需求越来越高,同时期望以更便捷的方式实现清洁。桌面智能清洁机器人作为智能清洁设备的一种,旨在提高小范围清洁效率,特别是在清洁办公桌、厨房台面、课桌等狭小且难以清洁的表面。研究桌面智能清洁机器人的目的和意义主要体现在以下几个方面:
(1)提高清洁效率
桌面智能清洁机器人通过自动化操作,可以在短时间内完成桌面的清洁工作,大大提高了清洁效率,节省了人力和时间。对于忙碌的现代人来说,这种可以代劳的家务清洁机器人具有极大的吸引力。
(2)减轻劳动强度
传统的桌面清洁往往需要人们弯腰擦拭,这种重复性且费力的动作对腰背部的负担较大。桌面智能清洁机器人能够代替人工进行这类清洁工作,减轻人们的劳动强度,对维护人体健康有着积极的意义。
(3)促进科技发展
桌面智能清洁机器人的研发和普及,不仅推动了智能家电领域的发展,还为传感器技术、人工智能、小型机械设计等相关领域的技术创新提供了平台,有助于整个科技产业链的提升。
(4)环保意识的提升
通过使用桌面智能清洁机器人,可以减少传统清洁过程中所使用的清洁剂和用水量,从长远来看,有利于资源的节约和环境的保护,符合当下社会提倡的可持续发展理念。
综上所述,桌面智能清洁机器人的研究具有重要的实际应用价值和社会意义,它不仅能够提高生活质量,还能推动相关技术的进步,并对环境保护产生积极作用。随着科技的不断发展和用户需求的多样化,桌面智能清洁机器人有望成为家庭清洁的得力助手。
本项目通过分析桌面垃圾特点,提出一台基于多传感器融合的桌面智能清洁机器人,其主要结构包括STC89C52单片机、吸尘风扇和擦桌海绵,搭载红外传感器和电动机驱动模块,在电路设计和避障算法上进行创新改进,采用轮式运动,同时可以任意切换清扫模式,具备智能高效、灵活敏捷、节能环保等特点,可清扫多种不同类型的桌面垃圾,擦拭桌面污渍,该机器人的设计和研发将会大大提高桌面清洁效率和质量。
结构说明:
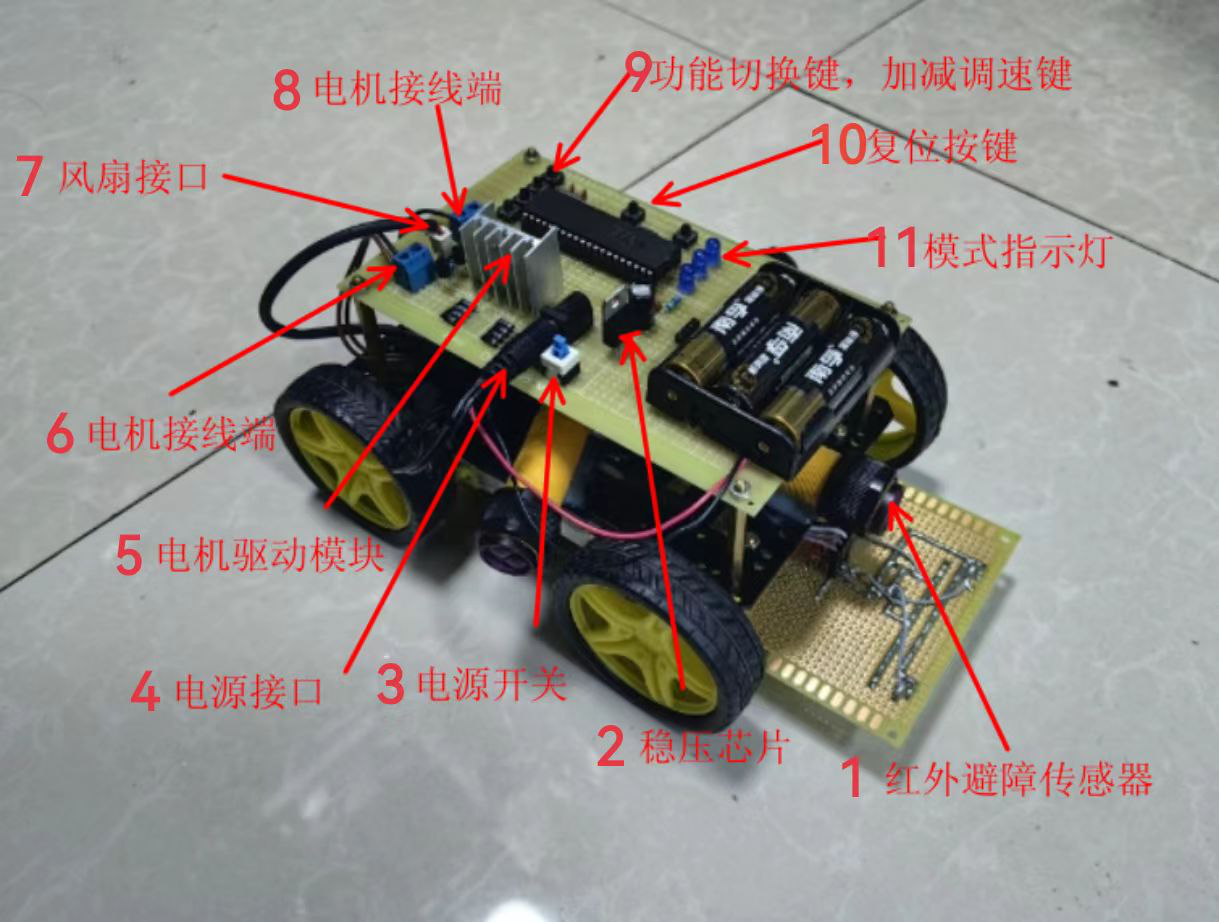
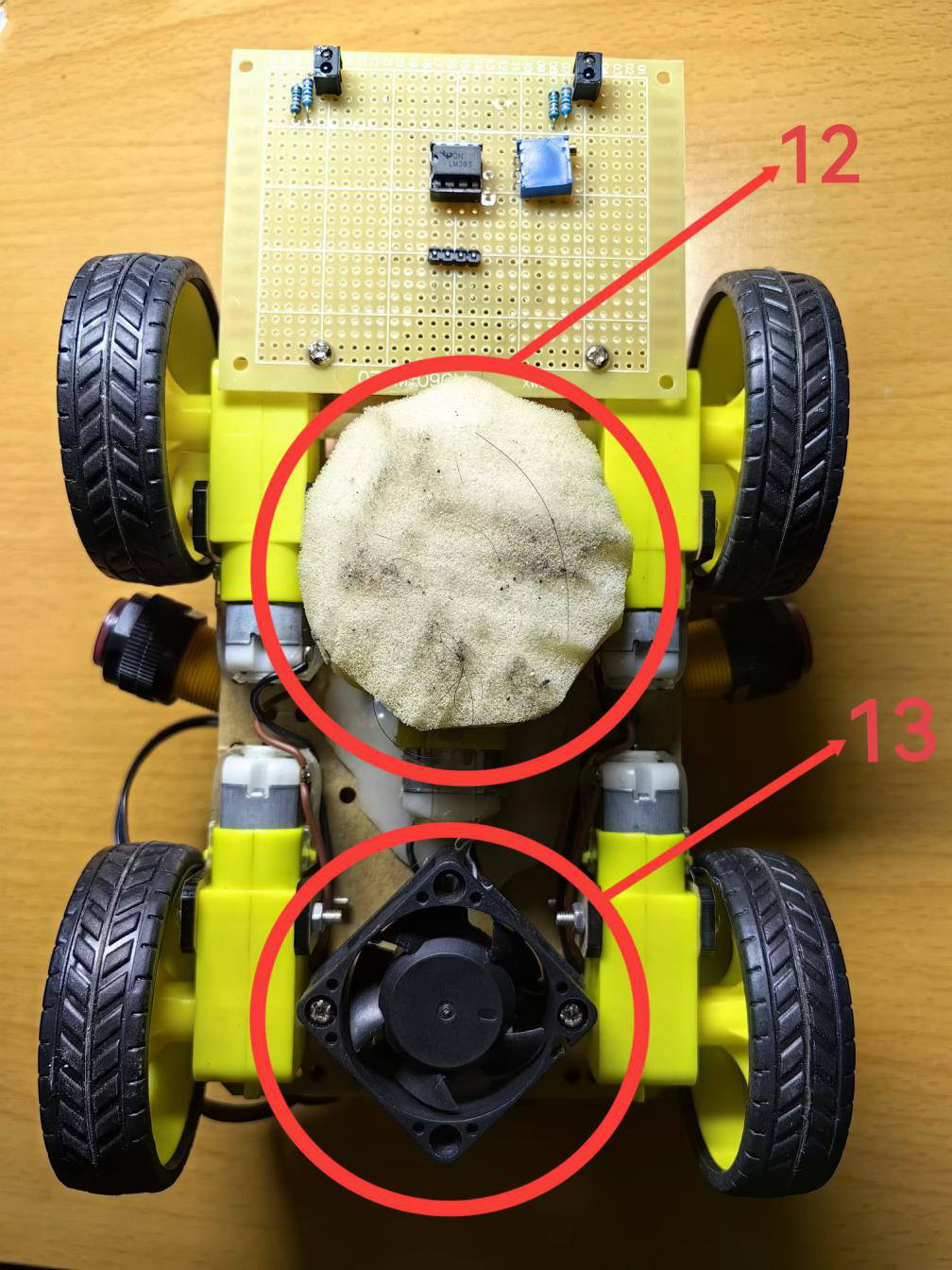
整体结构设计:1.红外避障传感器 2.稳压芯片 3.电源开关 4.电源接口 5.电机驱动模块 6.电机接线端 7.风扇接口 8.电机接线端 9.功能切换键,加减调速键 10.复位按键 11.模式指示灯 12.擦桌海绵 13.吸尘风扇
功能与使用说明:
桌面清洁机器人是一款高性能的智能清洁机器人,其主要功能是清理办公桌、厨房台面、课桌等狭小且难以清洁的表面。该设备采用STC89C52单片机作为中央微型硬件处理器,能够实现信号的接受、处理和发送,对红外避障模块和防跌落模块所采集的桌面路况信息进行处理。通过将处理后的信号传输到智能避障系统处理器,能够对其信号进行进一步的处理,发出新的指令到电机驱动模块,驱使机器人进行相关动作,最终实现机器人执行的稳定性和对桌面的高效清洁。桌面智能清洁机器人具有风扇吸尘、海绵擦桌、智能避障、往返清扫、沿边清扫、任意清扫,智能避障等功能,具有防跌落、防缠绕、躲避桌面物品、快捷便携等特点,该机器人的设计和研发将会大大提高桌面清洁效率和质量。
设计原理:
本项目是基于多传感器融合的一台智能清扫桌面的轮式桌面智能清洁机器人,以STC89C52单片机微型硬件作为核心控制模块,对传感器传输模块和电动机驱动模块进行自动控制,以STC89C52单片机最小系统作为基础,以红外传感器代替人工视觉监控,此防跌落模块作为辅助系统,以电机驱动控制的旋转海绵代替人工擦桌,此清扫及擦桌模块作为辅助系统,使用清扫路径规划,通过多传感器数据融合算法、避障路径规划算法实现桌面清洁机器人的智能避障。
项目的总体设计框图如下所示:
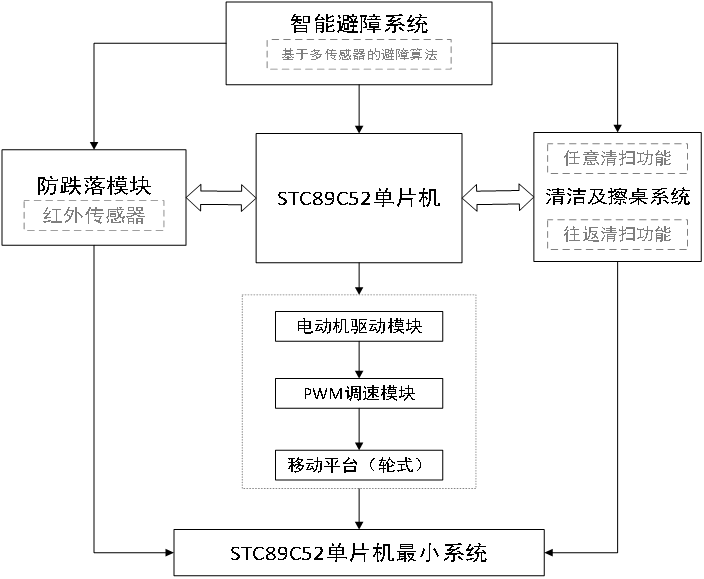
图 1 桌面智能清洁机器人的总体结构设计框图
设计方案:
硬件与软件技术要求
(1)基于单片机的防跌落模块
该机器人采用了先进的防跌落技术,利用红外传感器能够实时监测准确识别桌面悬空路段,具有较高的稳定性和可靠性。
(2)按键模块
左边第一个按键为扫桌模块的开启与关闭功能切换,第二个按键是功能的模式切换:分别为任意清扫模式、往返清扫模式、沿边清扫模式、停止模式。
(3)桌面吸尘模块
桌面智能清洁机器人的底部配备了电机驱动的风扇,能够有效地将桌面上的灰尘吹走。
(4)擦桌模块
桌面智能清洁机器人的底部装有一个圆形海绵,电机驱动海绵旋转完成擦桌,在海绵中还可添加有效清洁剂,保证海绵的湿度的同时,针对桌面的特殊污渍完成扫擦。
(5)往返清扫功能
桌面智能清洁机器人以S型方式进行扭进清程。
(6)任意清扫功能
桌面智能清洁机器人检测到前方障碍物时,机器人后退,然后右拐,实现任意清扫功能。
(7)沿边清扫功能
该功能能够使桌面智能清洁机器人在清扫过程中紧贴桌面边缘或墙角,调整行进路线,避免灰尘和杂物的滞留。
(8)基于单片机的红外避障模块
桌面智能清洁机器人通过实时检测周围环境、判断障碍物位置以及控制机器人避障动作等步骤,实现了智能导航和避免碰撞到桌面物品的功能。
(9)PWM机器人调速功能
PWM调速功能是一种高效、精确的电机调速方法,通过对电机转速的精准控制,确保避障的准确性,满足对不同桌面情况对转速的精确要求。调速功能可以减少能量损耗,提高机器人的清洁效率,不仅可以实现节能效果,也可以延长电机寿命。
(10)基于多传感器的避障算法研究
在决策算法中,基于融合后的数据和路径规划结果,做出实时的避障决策。这些决策包括调整桌面智能机器人的速度、方向和避让动作等,以避免与障碍物碰撞。决策算法需要考虑到桌面智能清洁机器人和桌面环境的动态变化,通过实时的决策,桌面智能清洁机器人可以快速响应桌面环境变化,保持工作时稳定性和高效性。
避障过程流程图如图2所示。将桌面清洁机器人放入作业环境中,红外传感器检测前方是否有障碍物,当检测到前方有障碍物后,触发避障程序控制机器人右转,根据当时黑白线的情况机器人自行选择转90°还是180°。选择的原理是根据循迹模块的中间一路是否检测到黑线为准,当中间一路90°检测到黑线时机器人就转90°当中间一路180°检测到黑线时机器人转180°。
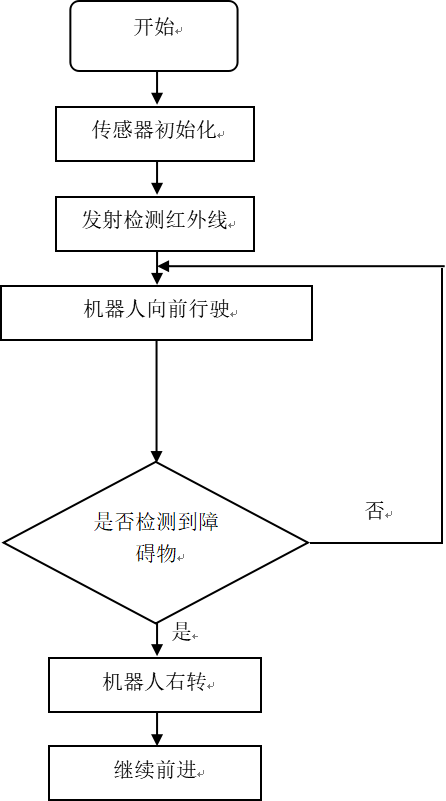
图 2 桌面智能清洁机器人避障过程流程图
综上,该桌面智能清洁机器人利用红外传感器监测识别桌面悬空路段,提高机器人的稳定性和可靠性;通过电机驱动控制的风扇将桌面上的灰尘吹走,实现有效吸尘;利用旋转海绵将桌面上的灰尘和污渍擦拭干净,完成湿擦功能;通过对电机转速的精准控制,完成满足对不同桌面情况对转速的精确要求,提高机器人的清洁效率和节能效果;往返清扫功能、任意清扫功能和沿边清扫功能预计根据不同的清扫需求进行选择;红外避障模块和基于多传感器的避障算法研究实现智能导航和避免碰撞到桌面物品的功能。多模块协同工作,预期达到高效、智能、稳定的桌面清洁功能。
通过对日常常见的书桌及餐桌桌面进行分析,桌面环境及垃圾类型如下表:
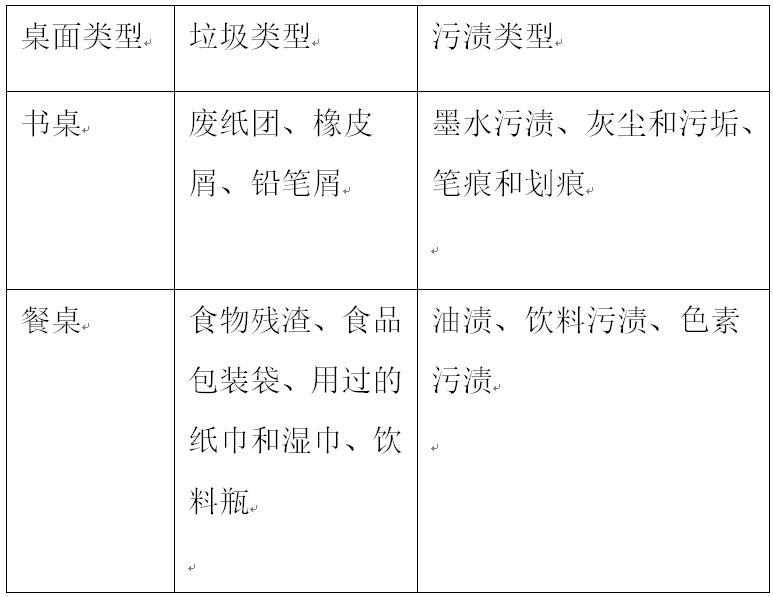
分析垃圾,得出垃圾的大小数据,有助于设计出既高效又适用于多样化桌面环境的智能清洁机器人。
产品特色:
桌面智能清洁机器人是一台集成了防跌落技术、红外避障功能、任意切换清扫模式、多传感器的避障算法的智能化清洁机器人,主要用来对桌面进行高效的清洁,可适用于清洁多种类型的桌面,该机器人有桌面吸尘模式和擦桌模式,两个模式协同配合工作,进而使清洁效率大大提高。






