作品名称:玻璃墙壁清理机器人
1.设计背景
近年来,工信部发布的《机器人产业发展规划(2016-2020 年)》、《促进新一代人工智能产业发展三年行动计划(2018-2020 年)》、国务院发布的《消费品标准和质量提升规划(2016—2020 年)》以及发改委编著的《中华人民共和国国民经济和社会发展第十四个五年规划和 2035 年远景目标纲要》中均提到发展服务机器人、家庭清洁机器人,提出在相关产品中广泛应用感应控制、语音控制、远程控制等技术手段,丰富终端产品的智能化功能,推动信息消费升级,着重在智能服务机器人领域取得突破,并改善智能家用清洁机器人的性能、消费体验和智能化水平。
玻璃墙壁清理机器人的设计背景主要是为了解决高层建筑外墙的清洁问题。随着城市化进程的加快,高层建筑越来越多,外墙的清洁成为了一个日益严重的问题。传统的人工清洁方法存在安全隐患,效率较低,而且可能会对建筑物表面造成损伤。因此,人们开始研究使用机器人来替代人工进行外墙清洁。
玻璃墙壁清理机器人的主要特点包括:
1. 安全可靠:机器人利用真空吸盘或者其他吸附装置牢固地吸附在墙面上,避免了人工清洗时的安全隐患。
2. 效率高:机器人可以通过自动行走和清洁装置,快速地完成外墙的清洁工作,效率远高于人工清洗。
3. 环保节能:机器人清洗过程不使用化学清洁剂,减少了对环境的污染,同时耗水量也远远低于人工清洗。
4. 适应性强:机器人可以根据建筑物的外形和表面材质进行调节,适用于各种类型的外墙清洁工作。
5. 智能化:机器人可以通过传感器和导航系统,自动识别墙面状况并规划清洁路径,实现智能化的清洁作业。
总之,玻璃墙壁清理机器人的设计背景是为了解决高层建筑外墙清洁的难题,提高清洁效率,保障人员安全,减少环境污染,适应各种建筑类型,实现智能化的清洁作业。
2.机体工作过程
模型的工作过程主要分为下面几步:
1:机器人正上方球形摄像机进行扫描,采集信息,提供视野,规避障碍物,识别并找出需要清洁的地方
2:四个小轮旁边的四个小方柱分别是四个动力系统提供在需要时提供不一样的动力形成差速以达成转弯原地旋转等多个动作
3:底座的 8 个圆型小物体是吸盘,利用压力差原理,使吸盘内外形成压力差以达到吸附固定作用,来协助机器人完成各种动作
4:底盘处的两个带有毛刷的大圆盘和两个带有毛刷的细长滚轮可以完成不同程度方向的旋转以达到更好的清洁功能。
5:地盘周边带有两条带有小孔的可通水的细管,可以再清洁时,向清洁地面均匀的撒上水,更好处理灰尘以及粘性物质,带来更好的清洁效果。
6:地盘周边还附带两条刮水条,再清洁完地面后带走多余水分,更加高效的完成任务
3.产品研究过程
首先我们确定研究对象为,设计一款半自动可进行高空玻璃清洁的机器。确定设备选择真空吸附系统,然后的控制方式为需人工辅助控制,接下来对挖掘部
分和整体机架进行介绍:
1:挖掘需求:真空吸附装置,又称真空吸盘,是一种利用真空产生的负压来抓取或固定物体的装置。在许多行业中,真空吸附装置具有广泛的应用前景。
以下是一些真空吸附装置的优点:
高效节能:真空吸附装置能够快速地吸附和释放物体,提高了工作效率,同时降低了能耗。
适应性强:真空吸附装置可以适应各种形状和尺寸的物体,使得其在不同领域都有很好的应用前景。
清洁环保:真空吸附装置不需要额外的辅助材料,如胶水、粘合剂等,减少了对环境的污染。
精确定位:真空吸附装置能够精确地定位和抓取物体,提高了工作效率和生产质量。
易于安装和操作:真空吸附装置通常安装简便,操作简单,能够快速投入使用。
成本低廉:相较于其他抓取装置,真空吸附装置的成本较低,有利于降低生产成本。
安全性高:真空吸附装置在运行过程中不会产生有害的污染物,对于工作人员来说更加安全。
多功能:真空吸附装置不仅可以用于抓取物体,还可以用于吸附、搬运、固定等操作,具有多功能性。
总之,真空吸附装置具有高效、节能、适应性强、清洁环保、精确定位、易于安装和操作、成本低廉、安全性高和多功能性等优点
2.整体机架:现阶段国内采用的多是悬挂式机器人,并且行动不便,转向困难,工作效率低,本设计机器人利用动力差可以快速高效的完成转向动作,并且多个方向的毛刷旋转可以更加有效的清理掉墙壁上的杂物,出水器和刮水器均有两个使得工作的效率大大提高。
3.设计分析
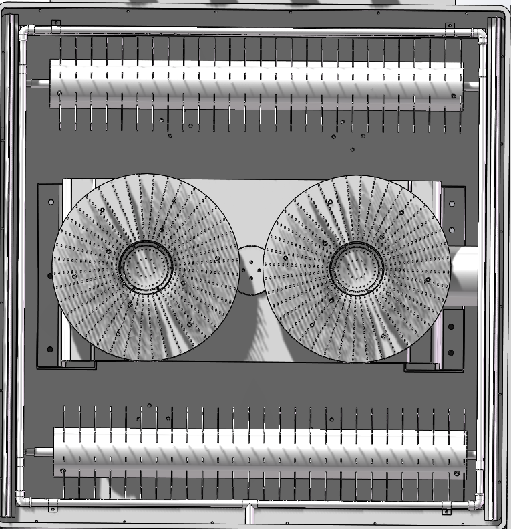 底座为两个喷水器,两个刮水器,四个毛刷构成共同协同完成清洁工作。
底座为两个喷水器,两个刮水器,四个毛刷构成共同协同完成清洁工作。
此为机器的剖面图详细的展示了内部结构,内部的齿轮带动毛刷的工作,两侧的空间当作储水空间。
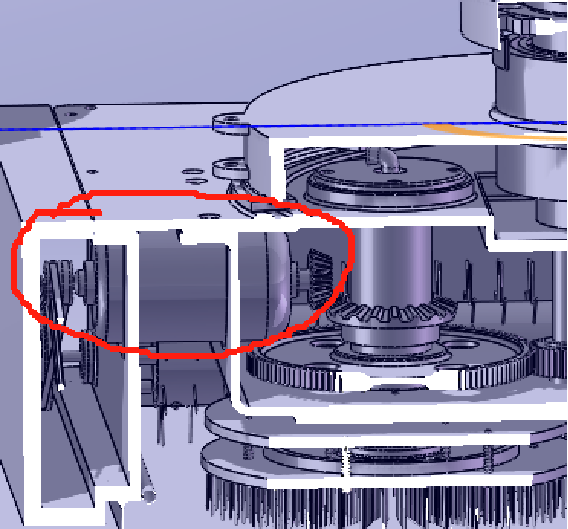
为马达提供动力(单侧),带动内内部圆刷,同时带动外侧履带以及两个滚刷。
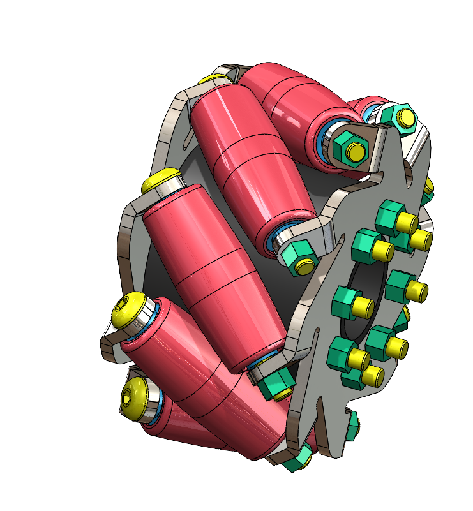 麦卡纳姆轮
麦卡纳姆轮
它的优点在于车体不必转弯即可实现横向运动,减少了运动空间,在一些空间狭小的直角弯偏多的地方占据明显优势,现在已普遍用于 AGV ,大大增强了 AGV的运输能力,同时也可用于移动机械臂中。
4.设计创新
主要有以下几点:
圆型摄像头,多方向式旋转清洁,真空吸附,出水管和刮水器的配合,动力差转向。圆型摄像头可以 360°无死角的观察到周围情况,以应对各种突发情况,高效识别周围的环境。多方向的旋转清洁可以更加高效,真空吸附装置起到很好的稳定固定作用,出水管和刮水器的配合让清洁工作变得更加方便,动力差转向使得机器人更加灵活。








