码垛机械手说明书
各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。随着工业自动化发展的需要,机械手在工业应用中越来越重要。用于再现人手的的功能的技术装置称为机械手。机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
一、当前国内外形式
1.国外机械手的发展历史
国外在20世纪60年代开始研究工业机器人,机械手是伴随着I业机器人的发展而出现的。最早将工业机器人技术用于物体的码放和搬运的国家是日本和瑞典。20世纪70年代末,日本第一次将机器人技术应用于码垛作业。1974年, 瑞典ABB公司研发了全球第一台全电控式工业机器人IRB6,主要用于工件的取放和物料的搬运。随着计算机技术和人工智能控制等技术的发展,德国、美国、日本等国家进一步对机械手进行研究, 并推出了自己的产品,如日本的FUJI系列、瑞典的ABB系列、德国的KUKA系列等。
2.国内机械手的发展历史与应用现状
我国工业机器人的研究和应用开始于20世纪70年代,当时发展比较缓慢,研究和应用水平比较低。20世纪80年代后,随着改开放的不断深入和国家政策的鼓励,使得我国工业机器人技术达到了一定的水平,机械手技术也得到了快速的发展。在借鉴和学习国外先进的机器人技术的同时,积极地研究开发自主产品,涌现出了一大批代表企业,国外机械手在我国市场一统天下的局面已被打破。但由于我国机械手的研究与应用起步较晚,总体看来,与国外相比还有很大的差距,如运行的可靠性、精度、适用性等方面都有待提高。我国机械手的发展规模仍然很小,产品规格较多并没有形成一个相对统一的标准和专门的产业,现有厂家的零部件大多进口,供货周期长,成本高。因此我们要脚踏实地,对机械手系统及结构进行深入的研究,进一步完善机械手相关产品,努力提高我们工业机器人的发展水平。国内已经有了多家的码垛机械手生产企业,这些企业的出现使得进口产品的价格下降很多,促进了码垛机械手的广泛应用,但是这些企业的产品在性能上与进口产品还有一定的差距,同时很多企业的产品的控制系统都是购买国外的,这就受制于国外。国内也有许多做运动控制或者数控系统的企业也看到了这已市场,有个别企业推出了自己的码垛机械手控制系统,而且在市场取得了一定的成绩。
二、当前发展问题
1.重复高精度
机械手是否能够按照已经给出的路线到达指定地点的准确性是检测机械手的精度与否的重要考量依据,机械手的大小取决于反馈装置的灵活度和驱动装置的分辨率。由于机械手需要承担
多次往复工作,所以机械手的重复精度更加受到人们的重视,其概念是机械手按照指定路线到达同意指定点的精确程度。机械手的一-次定位基准有可能会带来失准的问题,对于这个精度误差的问题可以通过多次试验定位基准得到误差反馈,然后利用这个反馈计算并且实现编程操作修正的方法加以解决。这种反馈调节机制在现代工业控制领域起着很大的作用,重复精度误差调节就属于其中的一-种。
2.模块化技术
现代机械传输技术的设计里加入了模块化技术,没有加入模块化技术的机械手叫做简单机械传输技术。模块化技术具有很多的优点,比方说加入导向驱动装置的机械手比不加导向装置的机械手具有安装体系机动性、更能符合弹性化的生产需求特点,凭借着这些具有不同模块带来的优点,现代机械传输技术的应用范围和应用功能得到了扩大和增加,所以模块化技术的运用是机械手未来发展的趋势。
3.机电一体化
机电一体化技术的进步就是机械手的进步,因为机械手里面大最运用着机电一体化的技术。现代工业生产中普遍采用可编程控制器来实现企业生产的高度自动化控制,PLC控制系统在可编程控制器里面是很重要的一种,它编程简单、程序容易修改、功率小等的特点在工业中应用广泛。除了PLC控制系统,现在很多机电-体化技术的发展都被用到了机械手中,比如自适应控制液压元件能够把原来的开环控制变成精度比较高的闭环控制系统,这就大大升高了机械手零件系统的集成深度。
三、机械手构造
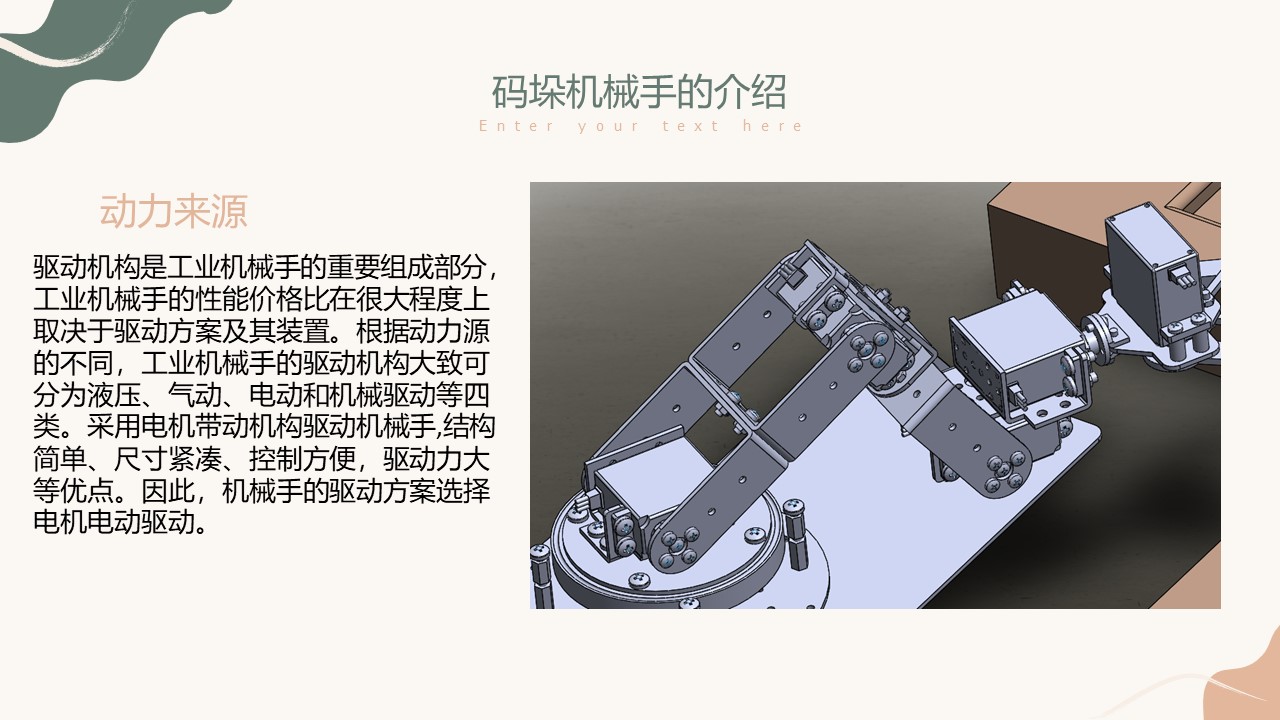
驱动机构是工业机械手的重要组成部分,工业机械手的性能价格比在很大程度上取决于驱动方案及其装置。根据动力源的不同,工业机械手的驱动机构大致可分为液压、气动、电动和机械驱动等四类。采用电机带动机构驱动机械手,结构简单、尺寸紧凑、控制方便,驱动力大等优点。因此,机械手的驱动方案选择电机电动驱动。
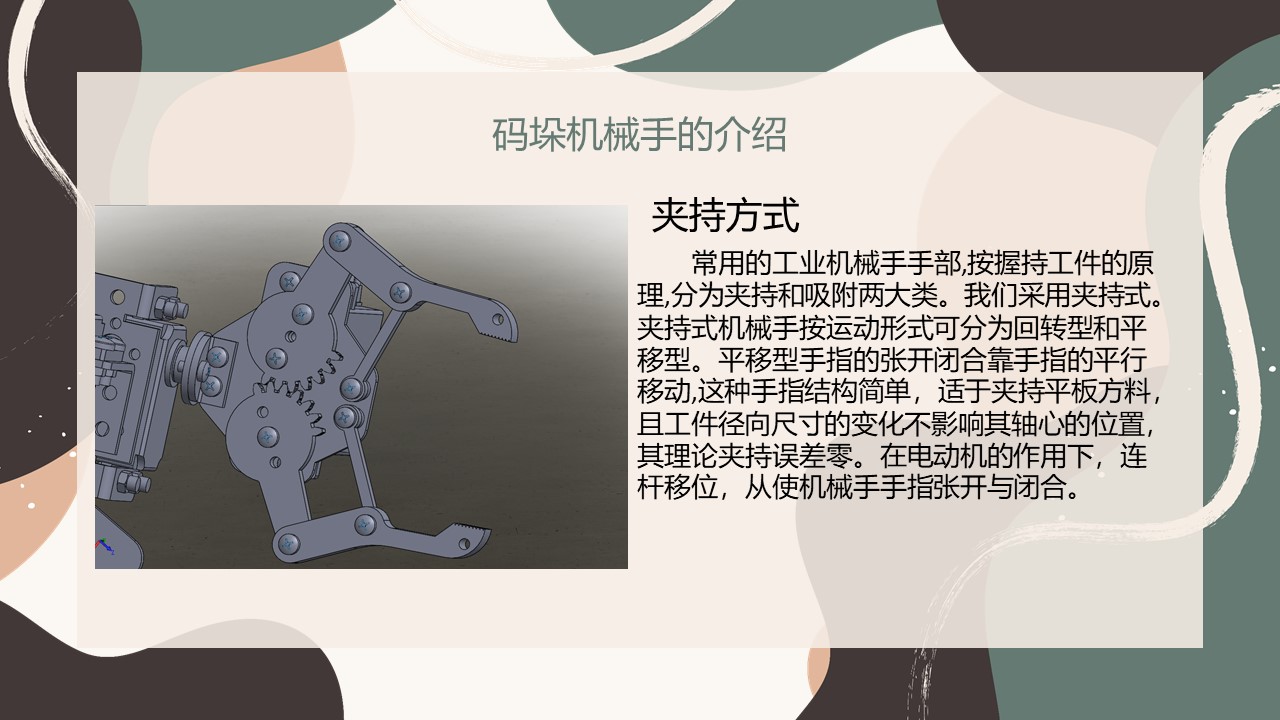
末端执行机构是码垛机械手的重要组成部分;码垛机械手直接与被抓取物料接触,相当于人的手掌,主要用于完成被码垛物料的抓取、移动以及码垛等动作。码垛作业任务是否能
够顺利完成,直接取决于末端执行机构的设计,要求末端执行机构能够稳定且准确的进行抓取和搬运作业,由于在工作中,我们抓取的物料结构大小和品种有所不同,包括箱形、板形、袋形以及圆柱形物料等。因此码垛机械手的末端执行机构必须能随着生产线上物料的改变而改变实现抓取作业。如今的工业生产中有着各式各样的末端执行机构按照结构类型的不同,可以分为叉形末端执行机构、真空吸盘型末端执行机构、夹板型末端执行机构,以及后面发展起来的柔性执行机构和仿生执行机构五种
叉形末端执行器的抓取机构为叉爪型,工作时,又爪放在物料的下方,然后将叉爪收缩将物料抬起实现搬运和码垛作业。工作效率高、抓取稳定、结构简单轻便但是其结构较比较庞大,相对于夹板型和真空吸盘型运行流畅度降低。通常用于较大较重的袋装物料,如米袋、水泥、面袋等。
真空吸盘型末端执行机构的抓取机构为真空洗盘,是通过真空吸盘的吸附作用对物料进行抓取与搬运。对光滑物料的抓取效果较好,但其结构复杂,工作不稳定。常用于表面水平并且较为光滑的玻璃板、石英板等板材或者尺寸较小且表面光滑的袋状物料的码垛。
夹板型末端执行机构的抓取机构为两个夹板,夹住物料的侧面通过摩擦力进行抓取质量轻便、设计简单、适应度好。但由于依靠摩擦力来进行抓取,不能抓取光滑的物料,常常用于尺寸较大的箱型物料。
柔性执行机构,就是指可通过调整相关参数就能适应不同工件的抓取搬运等功能的末端执行机构,具有较强的适应性还能够进行脆性物料和易碎物料的码垛和搬运。柔性机械手相较于前面三种机械手,具有适应性高、抓取范围广、抓取力度合适、不破坏物料等优点,但结构复杂,抓取力度小,不能抓取较重的物体。
四、码垛机械手的优势
1、操作环境
可在敞开式环境中进行操作,对工作环境要求不高,拥有独立的连杆机构。操作平稳简便,效率较高。
2、应用广泛
可应用于各种搬运、码垛工作。广泛应用在汽车、物流、家电、医药、食品、饮品等领域。
3、操作范围
在较大范围内可搬运、码垛一种或多种物品,且性能好。
4、节能环保
因其结构简便、手臂灵活、耗电较低,既节能又环保。即使在高速运作的环境下,可靠性也非常高。
5、更换方便
码垛机械手采用直线导轨、输送机也是皮带型的标准件,如有破坏,采购零件及更换零件很方便。![]()







![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

























