大赛作品详情

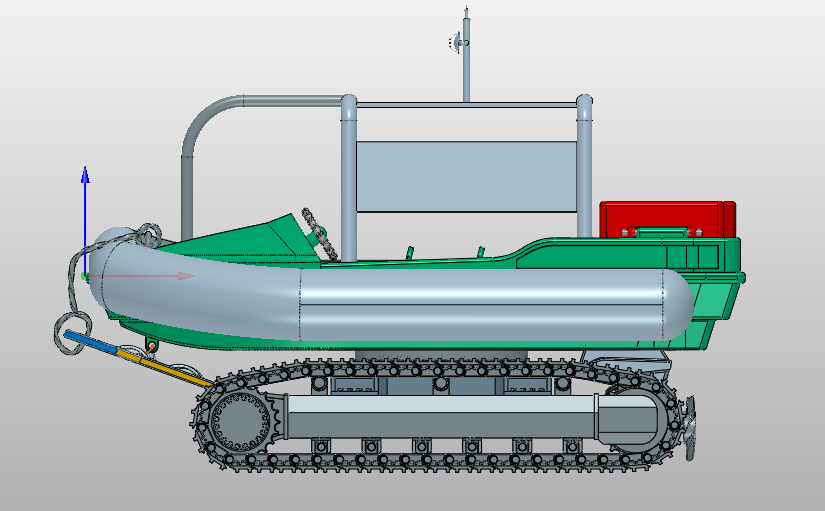
作品名称:水陆两栖救援机器人
学校名称:四川航天职业技术学院
参赛队伍:无忧无虑
参赛学生:吴忧 严鹏 黄紫琪
指导老师:蒲杰 付文强