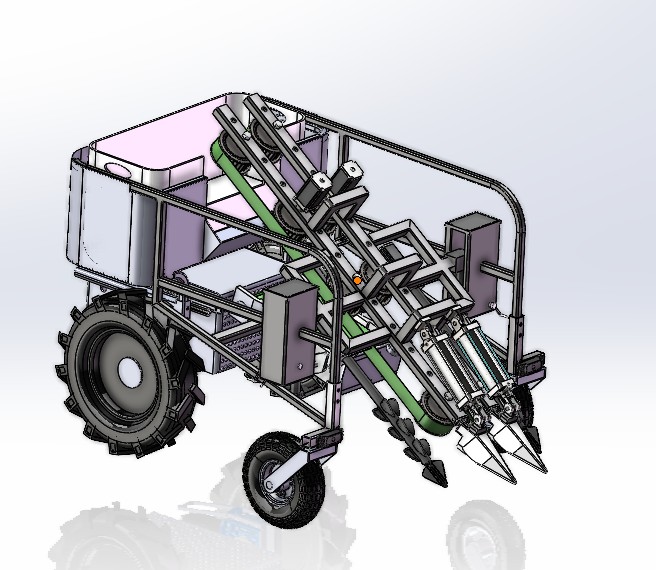
该收获机装置采用SolidWorks三维软件进行结构设计并加以优化。图1为丘陵智能萝卜收获机图。该机体主要由转动式松土装置、拢叶装置、挖掘装置、传动输送装置及切缨装置等几部分组成。运用PLC智能控制,以直流电动机作为驱动。控制软件为TIA Portal,电源给控制器供电,控制器各个输出端口与各对应电机端口相连,控制器依据程序指令实现电动机的转动。开始工作时,微型摄像机识别萝卜缨的位置,信息传递给处理器,控制电动液压杆伸缩,调整拢缨杆的角度,将倾倒的萝卜缨扶起。同时液压马达驱动弯曲型松土铲旋转,疏松土壤,减少拔取萝卜时的阻力。自动调节电动液压杆使拢缨杆准确扶起缨叶的同时由同步带夹住缨叶与块茎之间的部分,随着在电机的传动下,萝卜由皮带轮和加紧装置的作用下向上移动,经过切缨机构时,由安装在输送液压马达下面的双圆盘式的锯齿状刀片将缨叶与块茎分离,实现精准切缨。而缨叶则由同步带继续上移进入缨叶收集箱中收集起来,块茎则掉落至下方的传送带并由其送入下面的萝卜块茎收集箱中。缨叶收集箱和块茎收集箱分别通过把手和滑轨进行卸载,方便收集和处理萝卜及缨叶。同时可以根据不同萝卜品种和地面情况,通过升降机构调整输送架和松土铲的高度,确保作业效率和效果。
小型智能萝卜收获机由拢缨机构、搅动松土机构、升降机构、萝卜块收集与缨叶收集机构、萝卜剪切上料机构、切缨机构及行走机构七个部分组成,其总体结构如图2所示。
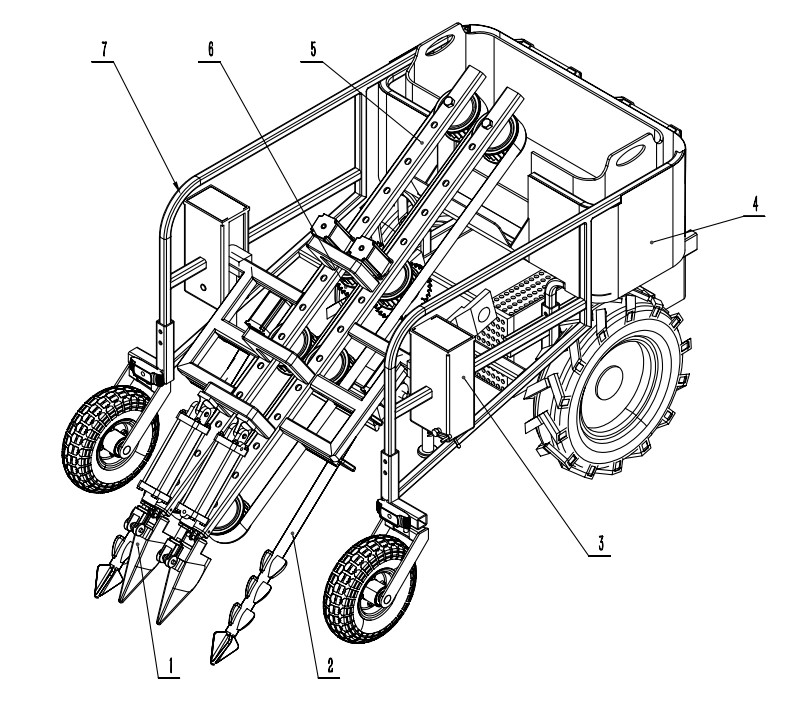
图2 小型智能萝卜收获机总体结构图
1拢缨机构;2搅动松土机构;3升降机构;4萝卜块茎收集与缨叶收集机构;
5萝卜剪切上料机构;6切缨机构;7行走机构
2.2.2各部件设计
1、拢缨机构
拢缨结构由拢缨杆、电动液压杆、安装座、皮带传动装置组成,其结构如图3所示,其中拢缨杆设计为“箭形杆”,并将其用安装座和连接装置与电动液压杆连接,电动液压杆与固定的安装座连接。拢缨杆可以在连接结构中改变两个拢缨杆之间的角度,以应对不同大小白萝卜的拔取。并且电动液压杆可以由行走机构前方的小型摄像装置识别到萝卜与缨叶的位置,从而将信息传递给处理器,进一步控制电流调节电动液压杆的伸缩,实现精准扶缨切缨的功能。
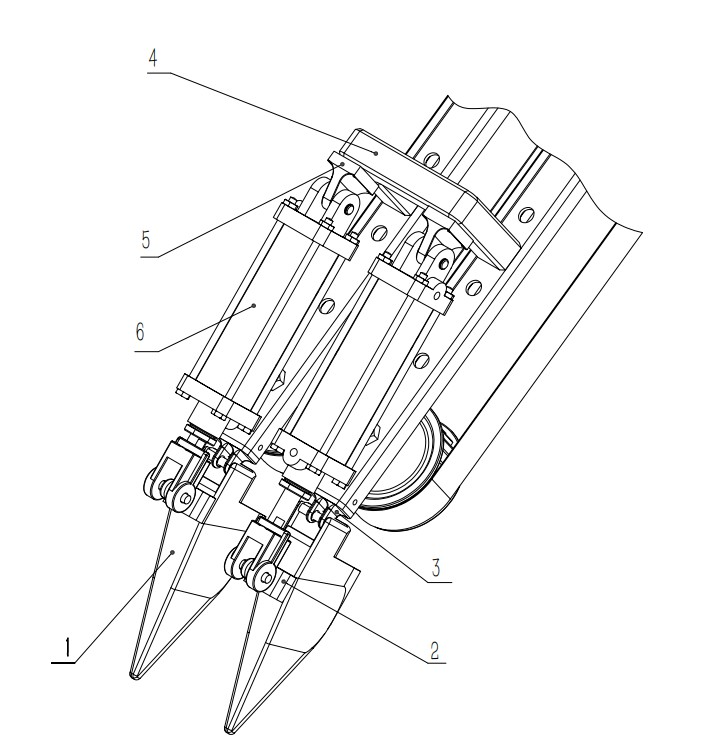
图3 拢缨机构
拢缨杆(1) 电动液压杆(6) 安装座(2—5)
2、搅动松土机构
该小型智能萝卜收获机的搅动松土铲为从前向后逐渐增大的弯曲型,其结构如图4所示,弯曲型松土铲的设计使其能够更好地适应各种地形和土壤条件。无论是平坦的耕地还是崎岖的山地,弯曲型松土铲都能有效地进行松土作业,确保作业效率和效果。弯曲型搅动松土铲在作业时能够更好地分散土壤对其产生的阻力。这种设计使得机械在作业时更加轻松,减少了动力消耗,同时也降低了机械磨损,延长了使用寿命。弯曲型搅动松土铲能够更深入地挖掘土壤,将土壤破碎得更彻底,从而提高松土效率。同时,其独特的形状也有助于将土壤均匀地分布在作业面上,使土地更加平整。弯曲型松土铲能够减少对作物根系的损伤。通过液压马达驱动搅动松土铲做旋转运动,避免对根系造成过大的压力,有利于作物的生长和发育。两个安装架确保了搅动松土铲旋转的稳定性。
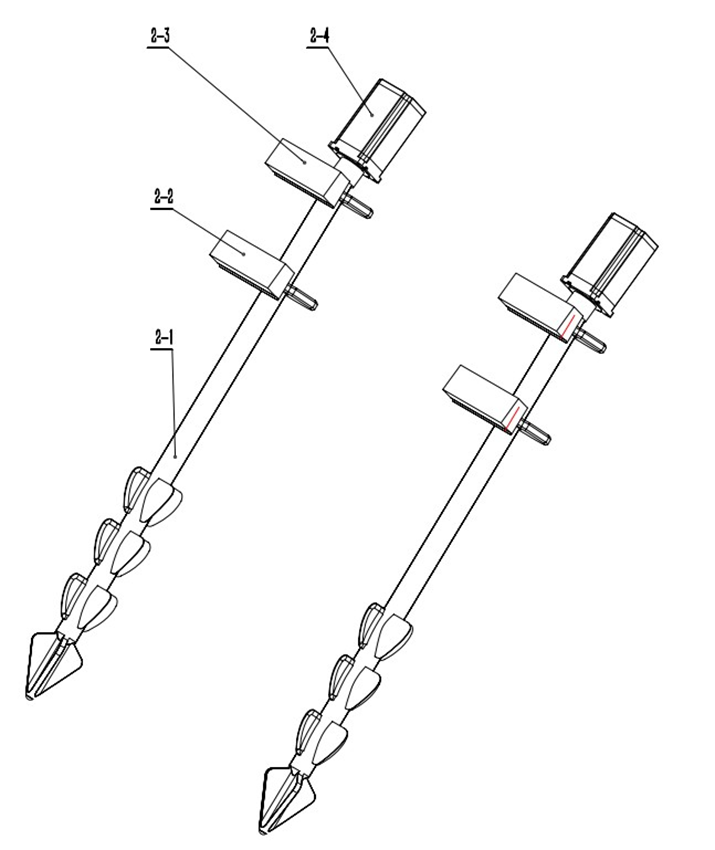
图4 搅动松土机构
弯曲型搅动松土铲(1) 液压马达(4) 安装架(2—3)
3、升降机构
升降机构由升降杆、保险栓、摇杆、箱体、传动轴组成,其结构如图5所示。摇动摇杆通过齿轮来控制升降杆的升降,保险栓正常情况下与棘轮相接触从而达到防止升降杆不受控制的降落,将保险栓下扣,则可以通过摇杆使升降杆下落。升降杆连接着输送架,由于不同的萝卜品种,使得萝卜裸露在表面的高度不同,可以通过升降装置从而实现不同品种萝卜的收获。大大提高的产品的实用性。并且在面临凹凸崎岖的路面时可以升高升降杆,从而提高了输送架和弯曲型搅动松土铲距离地面的高度,可以更好的防止地面对其的阻碍和损耗。
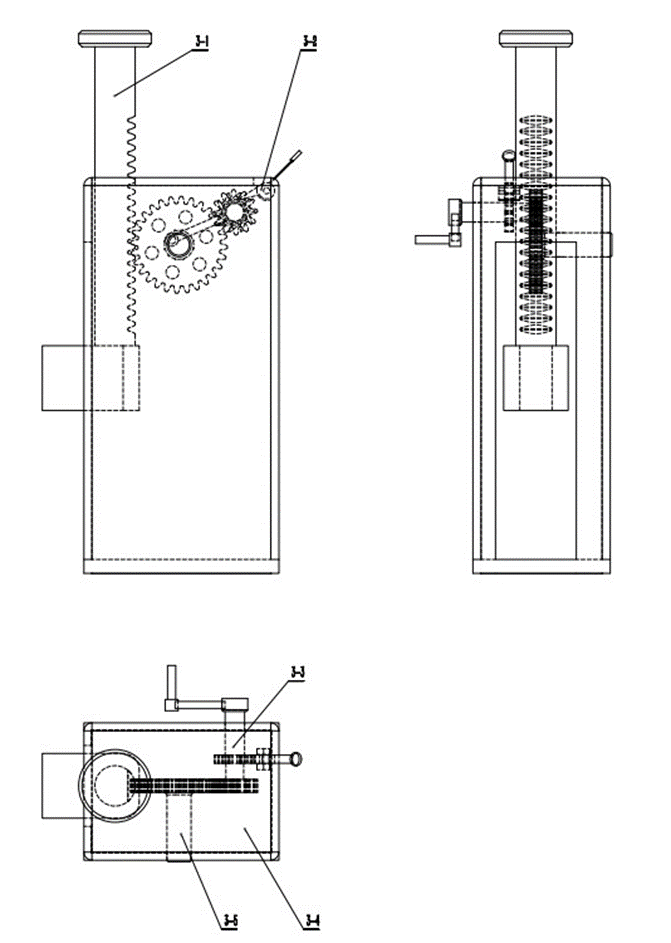
图5 升降机构
升降杆(3-1)、保险栓(3-2)、摇杆(3-3)、箱体(3-4)、传动轴(3-5)
4、萝卜块茎收集与缨叶收集机构
萝卜块茎收集和缨叶收集机构由传送带、缨叶收集箱外壳、缨叶收集箱、手把、底部支撑架、滑轨、萝卜块茎收集箱组成,其结构如图6所示。块茎由切缨装置切除缨叶,掉落到传送带进一步送入块茎收集箱,传送带前段提升外壳高度,有效的防止萝卜从前段的掉落。而剩下的缨叶由传动装置送入缨叶收集箱。缨叶收集箱的外壳前段有防止洒落的缨叶的斜坡,并且在其后端可以通过把手将其后端外壳拉下,从而能更加方便的装卸缨叶。而下端的块茎收集箱则可以通过滑轨和滑动轴实现省力的装卸,类似于抽屉的工作方式。从而达到更加省力、方便装卸的目的。
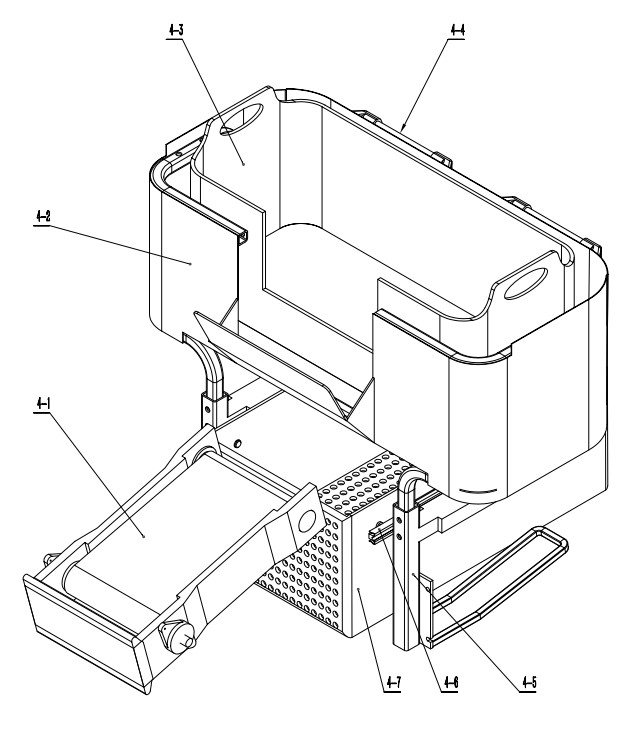
图6 萝卜块茎收集与缨叶收集机构图
传送带(4-1) 缨叶收集箱外壳(4-2) 缨叶收集箱(4-3) 手把(4-4)
底部支撑架(4-5) 滑轨(4-6) 萝卜块茎收集箱(4-7)
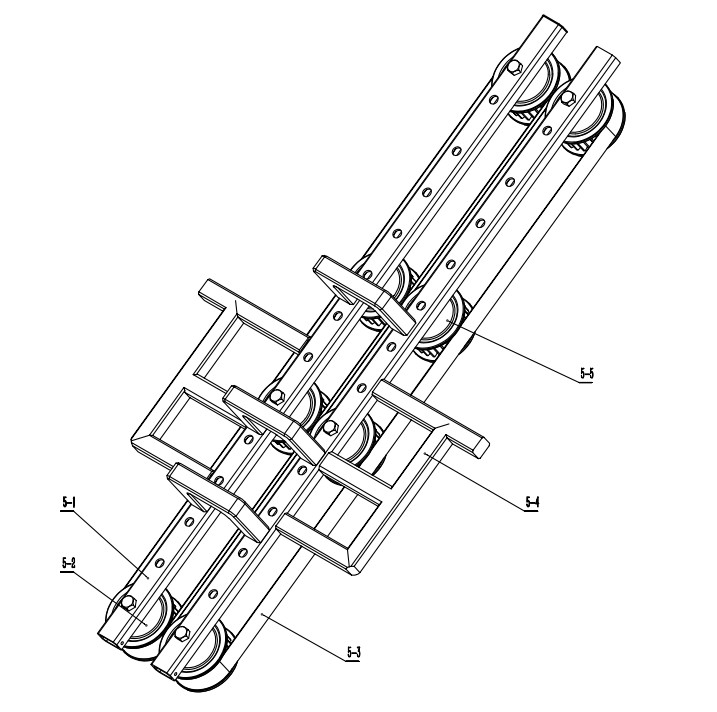
5、萝卜剪切上料机构
萝卜剪切上料机构包括输送架,其结构如图7所示,输送架固定连接在车架中部,输送架底部一侧转动连接有六个从动带轮,输送架底部另一侧转动连接有两个主动带轮,从动带轮和主动带轮之间通过同步带相连,通过拢缨机构对准萝卜露在土外面的块茎和缨叶的交接处,将萝卜缨导向至两个同步带之间,同时输送液压马达启动带动主动带轮轴转动,使得主动带轮轴会带动主动带轮和圆盘切刀转动,通过主动带轮、从动带轮和同步带的配合,使得经过拢缨机构收拢的萝卜缨能够夹在两个同步带之间,并被转动的同步带向后输送。
图7 萝卜剪切上料机构图
输送架(1) 从动带轮(2—3) 主动带轮(4) 同步带(5)
6、切缨机构
切缨机构由输送液压马达,其结构如图8所示,输送液压马达安装座,主动带轮轴,圆盘切刀四部分组成。在白萝卜被收集装箱前,需要将白萝卜的缨叶切除,便于白萝卜的装箱收集。因此,在夹拔输送装置末端设置切缨装置。目前使用较多的缨果分离装置主要为双圆盘切刀式和拉拽式,而拉拽式的缨果分离装置结构较为复杂,且占用空间较大,所以本机采用双圆盘式的切缨装置来完成缨果分离工作。双圆盘切刀作为切缨装置中最重要的部件,其相关参数会直接影响到切缨装置的切割效果。锯齿状圆盘切刀在切削白萝卜缨子时的能力强,切割质量较好。所以选用锯齿状圆盘。通过拢缨机构和皮带的传动使得白萝卜传送到圆盘切刀的部分,圆盘切刀在马达的带动下把萝卜缨和萝卜分开。
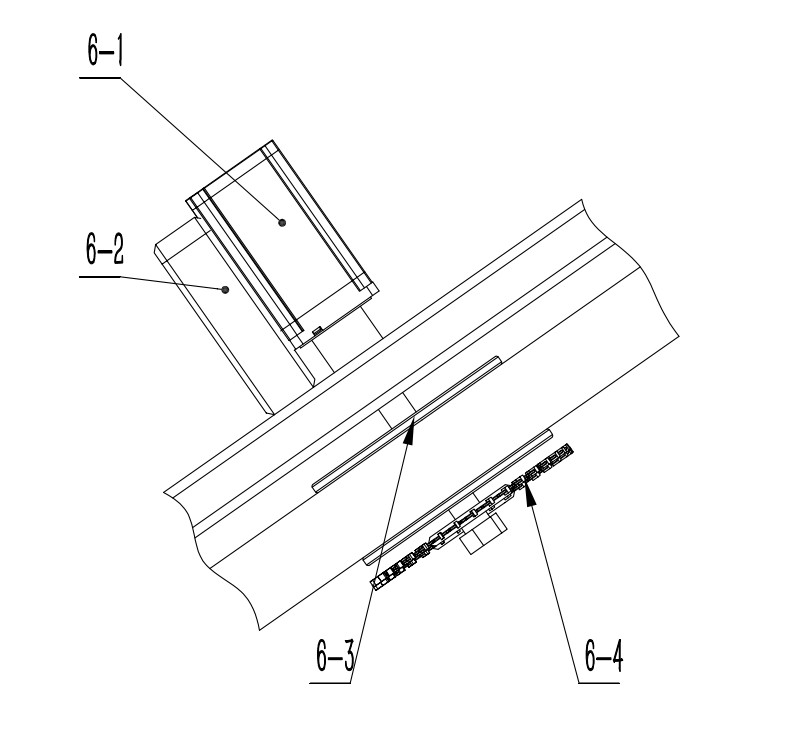
图8切缨机构机构图
输送液压马达(1) 输送液压马达安装座(2) 主动带轮轴(3) 圆盘切刀(4)
7、行走机构
行走机构由电机、车架、防滑车轮、万向轮、行走支架、摄像机组成,其结构如图9所示。电机驱动防滑车轮减少了人工干预,万向轮使设备可以任意调节方向,摄像机可以抓取缨叶的倒伏状态,从而自动调节电动液压杆使拢缨机构准确扶起缨叶。
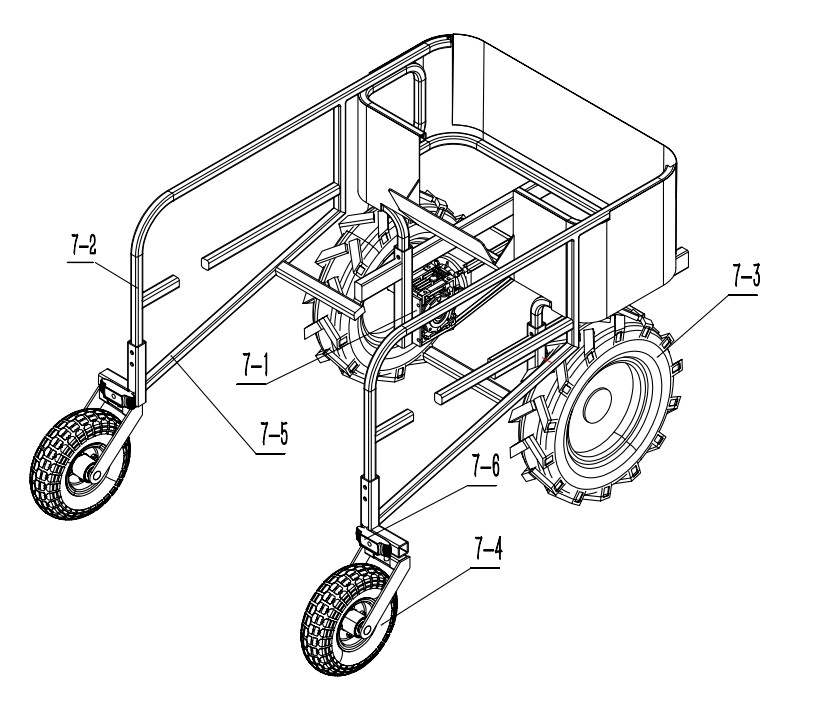
图9 行走机构图
电机(7-1) 车架(7-2) 防滑车轮(7-3) 万向轮(7-4) 行走支架(7-5) 摄像机(7-6)